Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
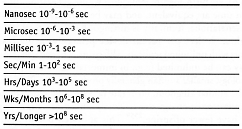
5.1.9.J Replicator Performance
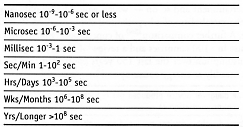
J1. Replication Time. Time required to produce one generation of daughter devices; generation time.
J2. Replicator Longevity.
Mean time to failure of the parental replicator device. In living organisms,
a gene-based biological clock related to telomeres [2557]
apparently plays an important role in establishing upper limits to the longevity
of individual replicators (organisms).
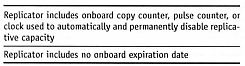
J3. Replicator Expiration Date.
Providing an expiration date, or a fixed duration of time tallied on an internal
counter, after which the replicative function will be permanently disabled [271,
2552] can contribute to public safety (Section
5.11). For example, the fictional robots manufactured in the robot factories
of Capek’s R.U.R. [657] were
designed to die after 20 years. In the absence of a clock, a simple pulse counter
or copy counter would serve a similar function – after registering some
fixed number of input pulses or replication cycles, the counter would automatically
sever the power transmission line. But note that most broadcast-architecture
replicators need not contain a clock or counter. If all onboard functions are
externally powered and controlled, the addition of an onboard stop clock would
be a superfluous safety measure, and the replicator could be sent commands to
permanently disable itself at any time.
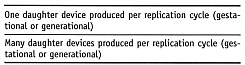
J4. Generational and Gestational Fecundity.
This is the number of daughters per generation, or per “litter”.
In biology, in the case of extended-maturation or birth-immature replicators
(Section 5.9.1), “generation time” customarily
refers to the time required for maturation of an immature replicator –
the time required to progress from fertilized egg to adult reproductive maturity
– whereas “gestation time” refers to the time required to
progress only from fertilized egg to live birth. Note that these replicators
tend also to have a relatively small number of litters during a relatively short
period of fertility (typically 30 years for human females) so that the number
of offspring per generation is not significantly different from the number of
offspring per parent (or breeding pair).
In the case of birth-mature replicators (Section 5.9.2), generation time and gestation time are synonymous because there is no post-birth maturation period required. Most proposed artificial replicators, particularly non-auxetic replicators (see I11), and many simple biological replicators such as viruses, bacteria, and other single-celled replicators that follow the eukaryotic cell cycle (Section 4.3.6), are birth-mature replicators whose generation time and gestation time are equivalent, and may be termed the “replication time.” Generational fecundity is distinguished from total number of daughter devices per parent device primarily in the case of replicators with unlimited replicative lifespans, wherein generational fecundity can be unlimited (e.g., in immortal cell lines).
In biology, smaller animals generally produce more offspring [2558]. Across the animal kingdom, birth rate falls steadily with increasing food requirements; energy use is closely linked to size, so bigger animals have fewer offspring [2559]. This appeared not to hold for humans, since a 100-kg female gorilla typically has 3-6 offspring while the average North American woman weighs considerably less but will have <2 babies [2559]. But Moses and Brown [2560] found that human birth rates fit the pattern perfectly on the basis of total energy consumption rather than body mass, since the average North American consumes ~11,000 watts including food, transport, heating, entertainment and so on – which would be roughly equivalent to the metabolism of a hypothetical elephant-sized 30,000-kg primate. A further comparison [2560] of contemporary birth rates and energy use in >100 countries and a review of U.S. fertility and energy consumption over the last 150 years confirmed that fertility declines steadily as energy consumption increases.
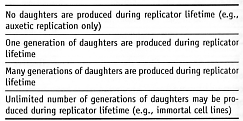
J5. Generational Longevity.
Refers to the longevity of the line of replicators – that is, can the
line of offspring potentially be unlimited? Establishing limits to the maximum
number of generations or replication cycles [2561]
might enhance public safety of artificial replicators (Section
5.11; see also J3), as already incorporated
in biology for other purposes (e.g., telomeres [2557]
and menopause [2562]). In the field of
cellular automata, Moore [353] required that
an entity be capable of causing arbitrarily many offspring in order to be considered
“self-reproducing”, and Lohn and Reggia [371]
also require unbounded growth potential for reproducers in their definition.
Of course, restrictions on the total number of generations does not provide
a logically complete safeguard against runaway replication unless generational
fecundity is also restricted, and vice versa. Meszena and Szathmary [2855]
employ a similar measure, called “lifetime reproductive ratio,”
which is defined as the expected number of offspring of a single replicator
during its entire lifespan.
J6. Nonreplicator Product Types.
Von Neumann originally examined “universal constructors” having
the ability to build any design that the instruction tape (genotype) can specify
(e.g., automaton “D” mentioned in Section 2.1.1).
Cellular automata have been devised that can both self-replicate and construct
arbitrary non-self patterns [413] in keeping
with von Neumann’s original conceptions. However, commercially useful
primitive limited-purpose replicators do not need this universality and will
be both easier to build and safer to operate if they lack this broad capability.
Replication-incompetent viruses have been employed to genetically transform
biological cells [2563] and in genetic
therapies in medicine [2564]. As our ability
to design more general purpose molecular assemblers and nanofactories grows,
additional safeguards must be added to these increasingly valuable systems to
maintain their status as “inherently safe” (Section
5.11).
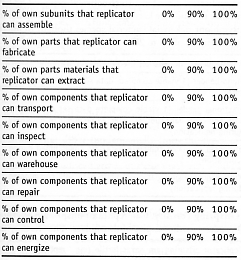
J7. Qualitative/Quantitative Closure.
Measures the ability of the replicator to gain access to all resources needed
for replication (Freitas and Gilbreath [2], Section
5.3.6 and Figure 5.22) and to avoid “production bottlenecks” [1128].
(See Section 5.6.) Friedman [19]
notes that replication with only partial closure (C) still allows the achievement
of quite appreciable production amplications A = 1 / (1 – C), (e.g., A
= 10-fold amplication for C = 90%), “which is quite valuable for reasonably
attainable closures of 90% or more.”
One safety concern first raised by Drexler [199] is the possibility that a microscale manufacturing system, once having been engineered to gather resources from natural environments, could, if not controlled, convert biomass on a large scale into a “gray goo” of identical replicators, a process which has more formally been termed “biovorous ecophagy” [2909]. In 2004 Drexler [3106] employed the somewhat opaque term “autoproductive” to describe engineered systems that are capable of self-replication but which entirely lack one or more key functionalities for safety reasons – that is, they possess low or 0% closure (Section 5.6) in some important design dimension(s), hence cannot replicate without outside assistance. In the case of replication control autonomy (A1), since at least the 1980 NASA study [2] (Section 3.13) such manufacturing systems have been widely known more descriptively as “teleoperated replicators” (Section 3.13.2), and since the early 1990s this mode of remote control has also been widely known as the “broadcast architecture” (Section 4.11.3.3). One could similarly arrange for 0% parts closure (E4) (aka. the “vitamin architecture”), 0% process energy closure (G1), 0% process manipulation closure (H1), and so forth. As Drexler [3106] reiterates:
A set of blacksmith’s tools can be used by a blacksmith to make a duplicate set. By themselves, the tools are inert, but with a careful input of skill and muscle they can be used to produce duplicates of themselves. Such a system, which can be replicated but only with substantial outside help, can be called ‘autoproductive’ to distinguish it from a self-replicating or self-reproducing system. A sufficient condition for the safe use of exponential manufacturing is to use only systems that are autoproductive, but are missing functionality that could make them self-replicating.
Drexler’s choice of the term “autoproductive” was particularly unfortunate because the customary meaning of “auto-” is “self-” or “self-causing,” yielding the exact opposite of the meaning intended for the neologism. A more precise term might have been “auxilioproductive,” from the two Latin roots meaning, literally, “needing assistance for production.”
J8. Emission of Waste Products.
How much physical waste material does the replicator produce, either during
replication or during non-self product manufacturing? The Merkle-Freitas assembler
(Section 4.11.3) is the first zero-emissions bottom-up
replicator ever proposed – its only effluent is more of its own exterior
working fluid – whereas, for example, the Sayama “workplace construction”
model [8, 9] assumes
production of garbage (used workplaces are discarded after self-replication).
Some designs may allow temporary sequestration of waste products in onboard
caches, which products are then discharged unprocessed as wastes at a time and
place well-removed from the time and place where replication or manufacturing
takes place. Other designs may provide for internal reprocessing of “wastes”
into “products” possessing alternative utility. Zero waste is possible
if the replicator uses all inputs in the construction of product. Of course,
even in an efficient design some waste heat is inevitable.
Last updated on 1 August 2005