Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.9.H Replicator Kinematics
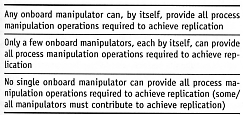
H1. Process Manipulation Autonomy.
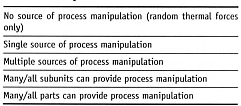
H2. Process Manipulation Redundancy.
As with G2, replicator reliability is enhanced
with greater redundancy of onboard manipulator systems.
H3. Process Manipulation Centralization.
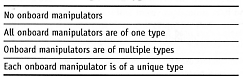
H4. Number of Manipulator Types.
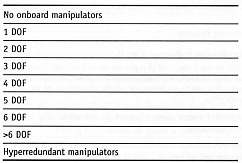
H5. Replicator Manipulation Degrees
of Freedom.
H6. Assembly Mechanism Style.
At an operating frequency of ~1 MHz, assembly of molecular-moiety building blocks
onto a workpiece across 10-nm pathlengths dissipates ~0.001 pW using mill-type
mechanisms and ~0.1 pW using manipulator-type mechanisms, though for 100-atom
building blocks both device classes may dissipate ~0.001 pW per atom moved (Nanosystems
[208], Sections 13.3.7.a and 13.4.1.f). Similarly,
mill-type mechanisms appear to be at least an order of magnitude more productive
per unit mass than manipulator-type mechanisms [208]
– e.g., at ~1 MHz at 10-nm pathlengths, a typical 250,000-atom mill assembler
could emplace ~106 feedstock atoms/sec on a workpiece giving a productivity
per unit mass (kg/sec per kg/assembler) of ~4 assemblers/sec, whereas a typical
5,000,000-atom manipulator assembler could emplace 5 x 105 feedstock
atoms/sec on a workpiece giving a productivity per unit mass of only ~0.1 assemblers/sec,
a ratio of ~40:1 in relative productivity per unit mass. However, manipulator
systems are far more versatile than mill systems (Section
5.9.6). This dimension may be generalized to describe, more broadly, programmable
vs. hard-coded assembly actions.
H7. Positional Accuracy.
The need for manipulator positional accuracy varies as a function of the building
blocks being manipulated. High accuracy is required to manipulate small parts
that require precise alignment, whereas only low accuracy may be required for
large parts designed to tolerate greater imprecision during assembly. This dimension
could be quantified either as a relative measure of positional accuracy as against
parts dimensions, or else as an absolute measure of positional accuracy in nanometers,
microns, millimeters, etc. For example, diamond mechanosynthesis on the C(110)
diamond surface probably requires C2 dimer positional placement accuracies
on the order of 0.2-0.5 Å [2324,
2325]. See also E2,
E8, E11, and F2.
Last updated on 1 August 2005