Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.9 Drexler Molecular Assemblers (1981-1992)
In 1981, Drexler [197] described the utility of holding and positioning molecular parts, introducing the concept of mechanosynthesis: “By analogy with macroscopic devices, feasible molecular machines presumably include manipulators able to wield a variety of tools. Thermal vibrations in typical structures are a modest fraction of interatomic distances; thus, such tools can be positioned with atomic precision....these arguments indicate the feasibility of devices able to move molecular objects, position them with atomic precision, apply forces to them to effect a change, and inspect them to verify that the change has indeed been accomplished....synthesis can then involve highly reactive or even free radical intermediates, as well as the use of mechanical arms wielding molecular tools to strain and polarize existing bonds while new molecular groups are positioned and forced into place. This may be done at high or low temperature as desired. The class of structures that can be synthesized by such methods is clearly very large, and one may speculate that it includes most structures that might be of technological interest.”
By 1985, Drexler was widely lecturing about “replicating assemblers” [2311] and, starting in 1986, Drexler [199, 208, 2910] proposed in greater detail the molecular assembler,* a device resembling an industrial robot which would be capable of holding and positioning reactive moieties in order to control the precise time and location at which chemical reactions take place.** This general approach would allow the construction of large atomically precise objects by a sequence of precisely controlled chemical reactions. Much like the ribosome in biology (Section 4.2), an assembler would build various classes of useful molecular structures following a sequence of instructions. During this process, the assembler would provide full three-dimensional positional and orientational control over each new molecular component (analogous to the individual amino acid in the ribosome model) that is being added to a growing complex molecular structure (analogous to the growing polypeptide in the ribosomal model). In one simple approach not mentioned by Drexler, a molecular assembler might be capable only of noncovalent assembly operations (Section 4.18), wherein nanoparts are fabricated by other means and then presented to the assembler, which then assembles the nanoparts into working nanomachines. Alternatively, a molecular assembler could be capable of forming any one of several different kinds of chemical bonds (e.g., by changing tool tips), not just a single kind such as the peptide bond that the ribosome makes. In bonding atoms or molecules to one another, the assembler would provide any needed energy through physical force – especially if the reaction happens not to be energetically favored – thus performing machine-phase chemical synthesis or mechanosynthesis as opposed to the traditional means of solution-phase chemical synthesis.
* But not a “universal assembler”: “Though assemblers will be powerful (and could even be directed to expand their own toolkits by assembling new tools), they will not be able to build everything that could exist” (Drexler [199] at page 246). The term “universal assembler” appears only in a section heading in Drexler’s popular work Engines of Creation [199] but not in the text; the term appears nowhere in Drexler’s major technical work, Nanosystems [208].
** Explains physicist Mark Gubrud [2312] helpfully: “The assembler can be viewed as a kind of flexible, programmable catalyst. In fact, it is like an active catalyst, an enzyme. Like an enzyme, by bringing the reactant directly to the site, it creates an extremely high effective concentration of reactants. It can also constrain reaction pathways and select transition states. So synthetic routes that are not available in conventional chemistry may become available with assemblers, as they are, also, with enzymes and other catalysts.” For example, the Merkle-Freitas assembler described in Section 4.11.3 can be regarded as a mechanical enzyme with the chemical formula C195,231,007H8,677,806Si30Sn30 that autocatalyzes the manufacture of its own structure in a very specialized environment.
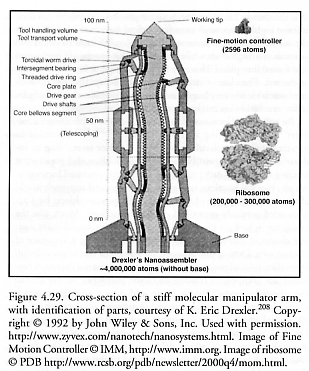
At its most basic level, the simplest possible nanoscale molecular assembler that is capable of self-replication may be composed of one or more nanoscale molecular manipulator mechanisms. For example, the hypothetical diamondoid telescoping molecular manipulator arm (Figure 4.29) described by Drexler [208] has about 4 million atoms excluding the base and control and power structures. Doubling the size to ~107 atoms to account for support structures gives a molecular weight of ~100 megadaltons and a total molecular volume of ~140,000 nm3 per arm. The arm is 30 nm in diameter and 100 nm in length, and a careful count reveals that the design includes exactly 49 parts excluding the base. Designed for high strength and stiffness, this robot arm should be able to hold a molecular fragment stiffly enough to make it react with the chosen end of a carbon-carbon double bond, possibly with an error rate of only 10-15 according to Drexler’s calculations [208]. The robot arm could then guide chemical reactions with high reliability at room temperature in vacuo, with little need for sensing the positions of the molecules with which it is working [2313]. Alternatively, using appropriate tool tips such an arm could grasp and manipulate individual prefabricated nanoparts in solution phase. Such assembly of nanoparts without fabrication might allow a much smaller tool set. The manipulator arm must be driven by a detailed sequence of control signals, just as the ribosome needs mRNA to guide its actions. Such detailed control signals can be provided by external acoustic, electrical, or chemical signals that are received by the robot arm via an onboard sensor or power transducer, using a simple “broadcast architecture” [208-210], a technique which can also be used to import power. Such transducers may be extremely small, on the order of (~10 nm)3 each [208].
Drexler proposed the first generic design for a molecular assembler (Section 4.9.1) in 1986 in his popular book Engines of Creation [199], published in 1986. In the early 1990s, following the dual approach laid out by the NASA Replicating Systems Concepts Team a decade earlier (Section 3.13.2), Drexler offered two distinct molecular manufacturing designs – a unit replication or “extruding tube” assembler model (Section 4.9.2) and a factory replication model (Section 4.9.3). In 1995, Drexler’s Foresight Institute helped sponsor a special prize to be awarded to the first person or research group to build the first major components of a molecular assembler (Section 4.9.4). A fourth design of Drexler for a minimal assembler [208], also published in 1992 in Drexler’s technical book Nanosystems [208], is described in Section 4.11.1.
Last updated on 1 August 2005
{kind=link}