Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.9.3 Drexler Nanofactory Replication System (1991-1992)
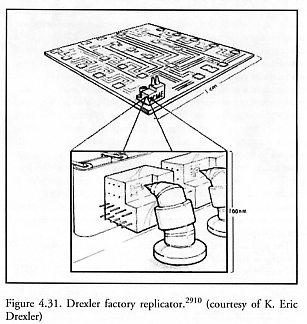
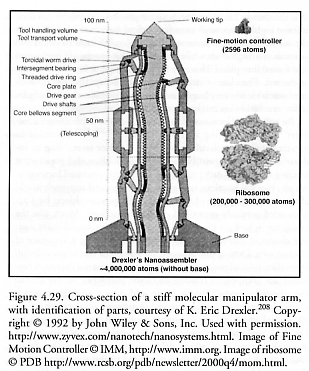
In the “unit growth” or factory model, a population of specialist devices, each one individually incapable of self-replication, can collectively fabricate and assemble all necessary components comprising all specialist devices within the system, hence the factory is capable of expanding its size (or of manufacturing duplicate factory systems) indefinitely in an appropriate environment. In Figure 4.31, a molecular manipulator arm (Figure 4.29) performs molecular assembly operations on a passing workpiece attached to a conveyor belt. The workpieces eventually move from one manipulator arm to the next in series, each arm performing specialized tasks, finally resulting in a completed factory component which can be joined with other completed factory components, either to expand the size of the current factory or to replicate another copy of the original factory. Thousands of manipulator arms could fit in the volume of a single cubic micron.
As Drexler describes this approach in an early popular presentation [2910] in 1991: “This general-purpose assembler concept resembles, in essence, the factory robots of the 1980s. It is a computer-controlled mechanical arm that moves molecular tools according to a series of instructions. Each tool is like a single-shot stapler or rivet gun. It has a handle for the assembler to grab and comes loaded with a little bit of matter – a few atoms – which it attaches to the workpiece by a chemical reaction. Molecular bonds hold things together. In strong, stable materials atoms are either bonded, or they aren’t, with no possibilities in between. Assemblers work by making and breaking bonds, so each step either succeeds perfectly or fails completely. In [pre-molecular] manufacturing, parts were always made and put together with small inaccuracies. These could add up to wreck product quality. At the molecular scale, these problems vanish. Since each step is perfectly precise, little errors can’t add up. The process either works, or it doesn’t. Thermal vibrations can cause mistakes by causing parts to come together and form bonds in the wrong place. Thermal vibrations make floppy objects bend further than stiff ones, and so these assembler arms were designed to be thick and stubby to make them very stiff. Error rates can be kept to one in a trillion [10-12], and so small products can be perfectly regular and perfectly identical. Large products can be almost perfect, having just a few atoms out of place.”
In a description of what a microscopic observer would see of this process, from inside a virtual reality simulation, Drexler writes [2910]: “One assembler arm is bent over with its tip pressed to a block on the conveyor belt. Walking closer, you see molecular assembly in action. The arm ends in a fist-sized knob with a few protruding marbles, like knuckles. Right now, two quivering marbles – atoms – are pressed into a small hollow in the block. As you watch, the two spheres shift, snapping into place in the block with a quick twitch of motion: a chemical reaction. The assembler arm just stands there, nearly motionless. The fist has lost two knuckles, and the block of nanocomputer is two atoms larger. [A few moments later], the assembler arm has moved by several atom-widths. Through the translucent sides of the arm you can see that the arm is full of mechanisms: twirling shafts, gears, and large, slowly turning rings that drive the rotation and extension of joints along the trunk. The whole system is a huge, articulated robot arm. The arm is big because the smallest parts are the size of marbles, and the machinery inside that makes it move and bend has many, many parts. Inside, another mechanism is at work: the arm now ends in a hole, and you can see the old, spent molecular tool being retracted through a tube down the middle. Within a few minutes, a new tool is on its way back up the tube. Eventually, it reaches the end. Shafts twirl, gears turn, and clamps lock the tool in position. Other shafts twirl, and the arm slowly leans up against the workpiece again at a new site. Finally, with a twitch of motion, more atoms jump across, and the block is again just a little bit bigger. The cycle begins again. This huge arm seems amazingly slow, but the standard simulation settings have shifted speeds by a factor of over 400 million. A few minutes of simulation time correspond to less than a millionth of a second of real time, so this stiff, sluggish arm is completing about a million operations per second.”
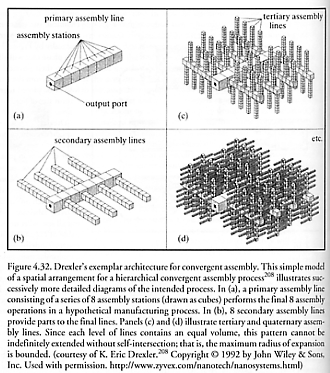
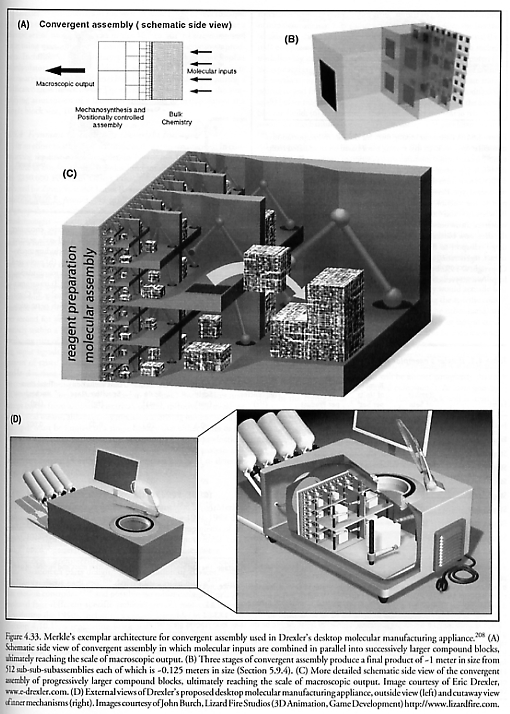
The molecular manufacturing factory employs the principle of “convergent assembly” [208, 213] to maximize efficiency. Using convergent assembly, molecular assemblers build blocks that go to block assemblers. The block assemblers build block assemblies, which go to system assemblers, which build systems, and so forth. “If a car were assembled by normal-sized robots from a thousand pieces, each piece having been assembled by smaller robots from a thousand smaller pieces, and so on, down and down,” Drexler explains [2910], “then only ten levels of assembly process would separate cars from molecules.” In Drexler’s proposed fractal convergent assembly process (Figure 4.32), the motion of components being assembled traces a tree in space. The trunk corresponds to the path traced by the final workpiece as the final components are assembled, the branches correspond to the paths traced by those components as they are assembled from simpler parts, and so forth – with the final stages resembling the middle and earlier stages, thus creating a fractal progression [208]. Merkle [213] has proposed a simpler configuration (Figure 4.33) that retains many of the desirable performance characteristics of Drexler’s system. (See also Section 5.9.4.)
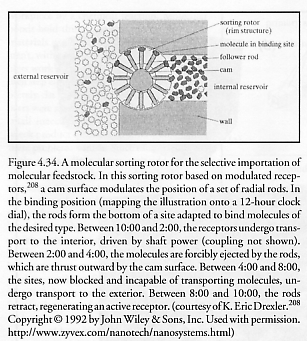
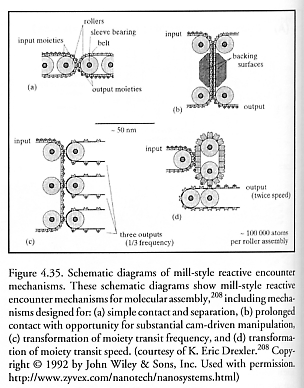
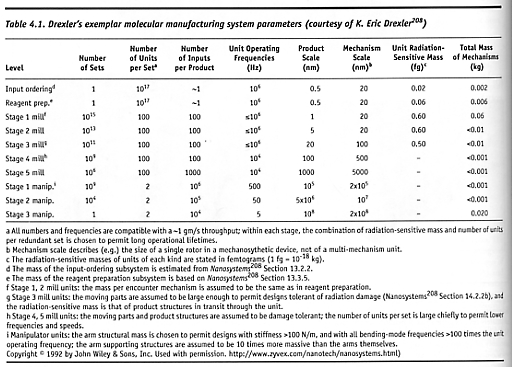
In his 1992 technical analysis of this factory approach to molecular manufacturing systems [208], Drexler outlines an architecture for a system capable of manufacturing macroscopic product objects of mass ~1 kg and ~20 cm dimensions in a cycle time of ~1 hour, starting from a feedstock solution consisting of small organic molecules. The feedstock molecules enter the system through a molecular sorting and orientation mechanism (Figure 4.34), pass through several stages of convergent assembly using mill-style mechanisms (Figure 4.35), and then pass through several more stages of convergent assembly using manipulator-style mechanisms (Figure 4.29). The full system has 10 stages with progressively larger machines assembling progressively larger components at progressively lower frequencies (Table 4.1). If the manufacturing system can manufacture all of the components of which it is itself composed, Drexler’s proposed desktop manufacturing system (system mass ~1 kg) would also be capable of self-replication in about 1 hour (Figure 4.33(D)).
Drexler [208] summarizes as follows: “A wide range of macroscopic products can be made with good efficiency by using mills to make a diverse set of building blocks in the 10-7 to 10-6 m size range and then using manipulators to assemble them into macroscopic products. Inclusion of a secondary production capability that applies manipulators to smaller building blocks (at the moietal level where necessary) can provide unusual building blocks without requiring a dedicated mill mechanism. The exemplar system...makes the simplifying assumption of a hand-off from mills to manipulators at a single block size, 10-6 m [~1 micron].”
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}