Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
Preface & Acknowledgments
The principal goal of molecular nanotechnology (MNT) is to develop a manufacturing technology able to inexpensively manufacture most arrangements of atoms that are consistent with physical law. In terms of its precision, flexibility, and low cost, this will be the ultimate manufacturing technology in human history. Two central mechanisms have been proposed to achieve these goals at the molecular scale: (1) programmable positional assembly and (2) parallel assembly.
Programmable positional assembly at the molecular scale is the central mechanism for achieving both great flexibility in manufacturing and the ultimate in molecular manufacturing precision. (Positional assembly is a manufacturing procedure in which components used in a construction are held in known positions and are constrained to follow desired intermediate physical pathways throughout the entire construction sequence; Chapter 4.) Methods for achieving positional assembly at the molecular scale are currently under active investigation by many research groups worldwide. Some of this work, especially mechanosynthesis work focused on positional assembly of diamond and diamond surfaces, will be the subject of a future publication [1].
Parallel assembly, whether using self-assembly, large manipulator arrays, or other self-replicating systems, is the central mechanism for achieving low cost manufacturing. (Parallel assembly is a manufacturing procedure in which a large number of product components or product objects are manipulated simultaneously in order to build bigger, more complex, or more numerous product objects; Section 5.7.) Self-replicating machines can make massively parallel manufacturing possible. System architectures by which this goal could be achieved, including specific conceptual architectures for nanofactories or molecular assemblers that should be capable of both molecular manufacturing and mechanical self-replication, are one important objective of the present work.
This book also offers the first general review of the voluminous theoretical and experimental literature pertaining to physical self-replicating systems since the NASA report and survey on self-replicating systems (SRS) which was published in the 1980s (more than 20 years ago) [2]. The principal focus here is on self-replicating machine systems. Most importantly, we are primarily concerned with “kinematic” [3, 4] self-replicating machines: machine systems in which actual physical objects, not merely patterns of information, undertake their own replication in physical space.
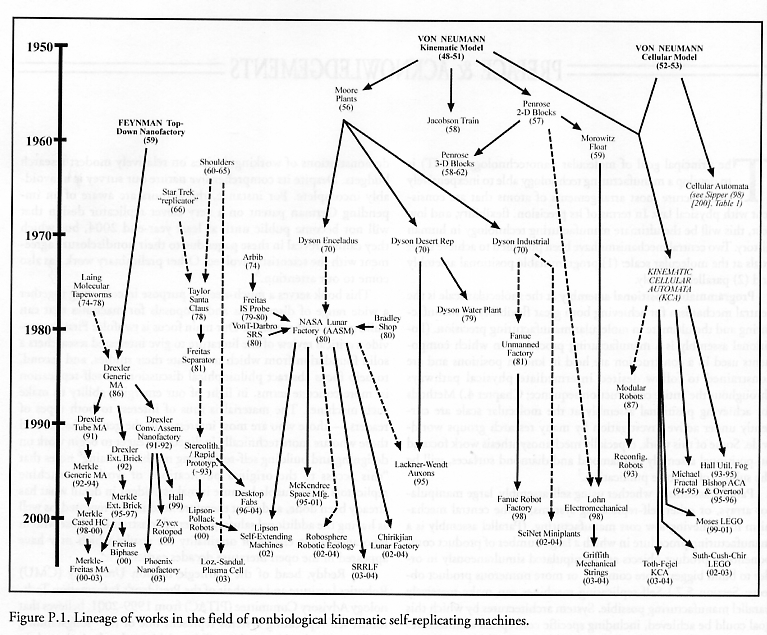
Most of the works described herein are mapped in Figure P.1, showing both the chronological development and the conceptual lineage. Following a brief burst of activity in the early 1980s, the field of kinematic self-replicating machine design received new interest in the 1990s with advances in robotics and an emerging recognition of the feasibility of molecular nanotechnology [208]. The field of kinematic self-replicating robots is currently experiencing an amazing renaissance of research activity among robotics engineers and scientists who have recently recognized that replicating systems are simple enough to permit experimental laboratory demonstrations of working devices on relatively modest research budgets. Despite its comprehensive nature our survey is unavoidably incomplete. For instance, the authors are aware of an impending German patent on a very clever replicator design that will not become public until at least year-end 2004, but which they cannot reveal in these pages due to their nondisclosure agreement with the scientists involved. Other preliminary work has also come to our attention [5].
This book serves a much-needed purpose in collecting together a wide range of discussions and proposals for machines that can build copies of themselves. Our main focus is twofold: First, to provide a critical review of the literature to give interested researchers a solid foundation from which to initiate their studies, and second, to help focus abstract philosophical discussions of self-replication in more concrete terms, in light of our emerging ability to make such machines. The material is thus of interest to both types of readers – those who are most interested in the general issues, and those who are more technically inclined and eager to begin work on designing and building self-replicating machines. Laing [6] notes that “this access to the original publications of work on machine replicators is invaluable because it makes evident in detail what has already been done, and what therefore need not be repeated, as well as having the additional salutary effect of constraining those who in ignorance make claims of originality for results which may have appeared in the open literature decades earlier.”
Raj Reddy, head of the Carnegie Mellon University (CMU) Robotics Institute and co-chair of the President’s Information Technology Advisory Committee (PITAC) from 1999-2001, believes that robust self-replicating systems represent one of the “longstanding challenges in the AI area that will be within technological reach in the next twenty years.” [7] There is increasing interest from the artificial intelligence and artificial life communities in this research, with M.A. Bedau, T.S. Ray, H. Sayama, and others [8-10] regarding the creation of “an artificial system that demonstrates robust self-replication and evolution in the real physical world [as] among the grand challenges in artificial life.” In a July 2003 interview [11], Steve Jurvetson, a managing director at the California venture capital firm Draper Fisher Jurvetson, noted that “putting a bold, audacious goal out there could be very galvanizing. Whether conceptualized as a universal assembler, a nanoforge, or a matter compiler, I think the ‘moon-shot’ goal for 2025 should be the realization of the digital control of matter, and all of the ancillary industries, capabilities, and learning that would engender.”
Over the last century, research in artificial self-replication has progressed along two major tracks.
The first track of research is the field of cellular or computational self-replication, which investigates self-replication purely in the context of patterns of information, most notably patterns organized and mediated by cellular automata [200, 380-384]. This area has received by far the greatest theoretical and experimental attention, because experiments require only general-purpose computer hardware, along with software for which the grammars, rules and constraints of operation have been more rigorously mathematically defined following the initial investigations of John von Neumann in the early 1950s (Section 2.1.3).
The second track of research is the field of kinematic self-replication, which investigates self-replication in the context of physical machinery that can make copies of itself by employing kinematic operations on physical matter – i.e., movement of materials through physical space in the physical world [3, 4], also pioneered by von Neumann starting in the late 1940s (Section 2.1.2). Here, theoretical and experimental successes have been somewhat fewer and more dearly won – but hardly, as some [12-15] have asserted unsuccessfully [16, 17], nonexistent. Although less research attention has been directed toward the kinematic area than toward the cellular area until fairly recently, this deficit is now being actively and enthusiastically remedied in universities and research laboratories in at least 17 countries (i.e., Canada, Denmark, France, Germany, Hungary, Ireland, Israel, Italy, Japan, Lithuania, Netherlands, Romania, Russia, Spain, Switzerland, U.K. and U.S.) around the world.
Writing in the final report of an NSF/NASA autonomous manufacturing workshop held in April 2000 [18], George Friedman, Professor of Industrial and Systems Engineering at USC, observed [19, 20] that the perception of self-replication research as an intellectual island is an illusion: “There are conjectures that self-replication theory is fundamentally different and separate from the more mainstream robotics research, and that is a reason for its lack of support and disappointing progress. However, ...self-replication has many issues and themes in common with advanced robotic concepts and it would be constructive for future research to consider self-replication – as well as evolution – as a natural intellectual extension of the robotics field. For example, the research agenda at the Space Studies Institute at Princeton considers a continuous spectrum of activities from direct man-in-the-loop, fully teleoperated robotics, increasingly autonomous robotics with AI, fully autonomous robots, cooperating hierarchies of robots, diagnosing and repairing robots, replacement and reconfiguring robots, and finally, self-replicating and evolving robots.”
While there are as yet (in 2004) no professional journals exclusively devoted to theory or experiment in self-replication (whether kinematic or cellular), there are many journals in related fields [21] where such research can be published. Readers wishing to keep abreast of the latest developments can visit http://www.MolecularAssembler.com, the first Internet domain exclusively devoted to molecular assemblers and the online home of this document and related materials. The authors would welcome, support, and recommend the establishment of a new journal for the field of self-replication engineering. As evidenced by the many and diverse works described in this book, the kinematic replicating systems research community is already of moderate size and growing, if still poorly organized.
Undergraduate and graduate engineering students can find courses or degree programs in macroscale mechatronics (the union of conventional mechanical, electrical, and computer engineering) offered at the following educational institutions: Arizona State University [22], California Polytechnic State University [23], California State University at Chico [24], Carnegie Mellon University [25], Clemson University [26], Colorado State University [27], DLR [28], Georgia Institute of Technology [29], Johns Hopkins University [30], Loughborough University [31], Massachusetts Institute of Technology [32], Mechatronical Secondary Vocational School [33], Michigan State University [34], Middlesex University [35], North Carolina State University [36], Rensselaer Polytechnic Institute [37], Rice University [38], San Diego State University [39], San Jose State University [40], South Bank University [41], Stanford University [42], Swedish Institute of Computer Science [43], Swiss Federal Institute of Technology Zurich [44], University of California at Berkeley [45], University of Dundee [46], University of Florida [47], University of Illinois at Urbana-Champaign [48], University of Linz [49], University of Melbourne [50], University of Southern Denmark [51], University of Twente [52], University of Utah [53], University of Western Australia [54], Vanderbilt University [55], and the Virginia Polytechnic Institute [56]. Lyshevski [84] has a nice discussion of the current situation in the mechatronics curriculum in engineering education. Institutions offering educational and research opportunities in microelectromechanical systems (MEMS) assembly automation, including micromechatronics [57, 58], and a list of current university and corporate programs in desktop micromanufacturing are given in Section 4.6.
University programs in nanoscale mechatronics (nanomechatronics), molecular robotics and nanorobotics, nanoelectromechanical systems (NEMS), and nanomanufacturing can be found at: Arizona State University [59], Brown University [60], California Institute of Technology [61], Carnegie Mellon University [62], Cornell University [63], Ecole Polytechnique Montreal [64], IEEE Nanotechnology Council [65], Nagoya University [66], New York University [1448], Northwestern University [67], Pennsylvania State University [68], Rensselaer Polytechnic Institute [69], Rice University [70], Rutgers University [71], Swiss Federal Institute of Technology Lausanne [72], Swiss Federal Institute of Technology Zurich [73], Technische Universitat Ilmenau [74], Tohoku University [75], University of California at Berkeley [76], University of California at Los Angeles [77], University of Illinois at Urbana-Champaign [78], University of Minnesota [79], University of North Carolina at Chapel Hill [80], University of Southern California [81], University of Texas at Austin [82], and the University of Tokyo [83].
University and allied programs related to artificial life research can be found at: Brandeis University [85], Brunel University [86], California Institute of Technology [87], Cornell University [88], Dublin City University [89], École Polytechnique [90], George Mason University [91], German National Research Centre for Information Technology [92], Hungarian Academy of Sciences and University of Szeged [93], Iowa State University [94], Liverpool University [95], Massachusetts Institute of Technology [96], Michigan State University [97], Nagoya University [98], Napier University [99], National Research Council (Italy) [100], New England Complex Systems Institute [101], Reed College [102], Santa Fe Institute [103], Soka University [104], Swiss Federal Institute of Technology [105], Syracuse University [106], Trinity College [107], Universidad de Granada [108], Universitat Dortmund [109], Universiteit van Amsterdam (Netherlands) [110], University College London [111], University of Aarhus [112], University of Aizu [113], University of Edinburgh [114], University of Electro-Communications [115], University of Guelph [116], University of Hertfordshire [117], University of Idaho [118], University of Illinois at Urbana-Champaign [119], University of Newcastle upon Tyne [120], University of New Mexico [121], University of Pennsylvania [122], University of Southampton [123], University of Sussex [124], University of the West of England at Bristol [125], and the University of Tokyo [126].
Specific courses on self-replication are appearing in universities around the world. For example, in Spring 2003 Gregory Chirikjian taught a mechatronics course entitled “Intelligence of Self-Replicating Robots” in the Department of Mechanical Engineering at Johns Hopkins University [30]. In Summer 2003, Hiroki Sayama [127] taught a course entitled “Invitation to Self-Replication Studies” in the Graduate School of Information Science at Nagoya University, Japan, which may continue in future years. Pavel Luksha [128] began teaching a new course “General Theory of Self-Reproduction” at The Higher School of Economics, Moscow, Russia, starting in February 2004.
The present work – Kinematic Self-Replicating Machines – would be a suitable text for undergraduate or graduate introductory coursework in kinematic replication theory, kinematic replication engineering, or similar topics.
References [####] are used in this book to denote the source of: (1) a direct quotation (enclosed in quotes), (2) a paraphrased passage (footnoted but not enclosed in quotes), or (3) a specific datum. Citations are also employed to indicate sources of additional information on a given topic, especially collections of literature review papers that would provide a suitable introduction to a given field of study. The authors apologize in advance for any inadvertent instances of unattributed usage of previously published material. Such events should be few but should be brought to the authors’ immediate attention for correction in a future edition of this work. An attempt was made to cite primary sources whenever possible, but some references are made to secondary sources believed by the authors to be reliable. References to website URLs which have become unresponsive can often be recovered by consulting the Web Archive at http://www.archive.org/index.html.
Acknowledgements
The authors would like to thank the following 136 people and organizations who provided assistance of various kinds, including reading the manuscript, offering useful comments, providing help in locating information or useful referrals to other researchers or materials, giving reprint permission, or other valuable assistance: Bryant Adams, Scott Adams, Rocky Angelucci, Emanuel F. Barros, Mark A. Bedau, Curt Bererton, David M. Berube, Robert G. Best, Martin Billeter, Forrest Bishop, Karl F. Bohringer, Nick Bostrom, Robert J. Bradbury, David Brin, British Interplanetary Society, William R. Buckley, John Burch, Arthur W. Burks, Alan J. Cann, John Canny, Carlos A. Castro, Gwen V. Childs, Gregory S. Chirikjian, CMU Robotics Institute, Mike Collins, Silvano P. Colombano, Paul Davies, Radu Dogaru, K. Eric Drexler, Freeman J. Dyson, Matthew Ellis, Suren Erkman, Ronald S. Fearing, Hicham Fenniri, Ricardo Flores, Foresight Institute, Stephanie Forrest, George Friedman, Robert A. Frosch, Fujitsu Fanuc Ltd., Timothy S. Gardner, James K. Gimzewski, Saul Griffith, J. Storrs Hall, B. Hasslacher, Tad Hogg, Tim J. Hutton, IBM, Takashi Ikegami, Institute for Molecular Manufacturing, Neil Jacobstein, JACS, Stepas Janusonis, (Japan) National Institute of Advanced Science and Technology (AIST), Gerald F. Joyce, George Khushf, Gunter von Kiedrowski, Loren W. Knapp, Ron D. Knott, Narayanan M. Komerath, Hans Koops, John R. Koza, Markus Krummenacker, Dennis Kunkel, Ray Kurzweil, Klaus S. Lackner, Richard A. Laing, Chris G. Langton, James B. Lewis, Hod Lipson, Jason Lohn, Pier Luigi Luisi, Pavel O. Luksha, Evan Malone, Daniel Mange, Pierre Marchal, Martin C. Martin, Constantinos Mavroidis, Wil McCarthy, Barry McMullin, Joseph Michael, Marvin Minsky, MIT Media Lab, Hans Moravec, Matt Moses, Arcady R. Mushegian, Nature, Philip van Nedervelde, Chrystopher L. Nehaniv, R.A. Owens, Oxford University Press, Rolf Pfeifer, Christopher J. Phoenix, Valenti Pineda, Jordan Pollack, John N. Randall, Thomas S. Ray, James A. Reggia, Aristides Requicha, Roland Riek, Kazuhiro Saitou, Arthur C. Sanderson, Hiroki Sayama, Science/AAAS, Nadrian C. Seeman, Peter Silcox, Moshe Sipper, Michael Sipser, Cameron Slayden, John Smart, Steven S. Smith, Sigvar Strandh, Scot L. Stride, Hong-Bo Sun, Jackrit Suthakorn, 3D Systems, Tim Taylor, Gianluca Tempesti, Georg von Tiesenhausen, Mark W. Tilden, Marco Tomassino, Tihamer Toth-Fejel, Steve Tung, Peter Turney, University of Massachusetts, Cem Unsal, USC Information Sciences Institute, Ron Weiss, Christopher H. Wendt, Xerox PARC, Mark Yim, Eiichi Yoshida, Eliezer S. Yudkowsky, Bernard Yurke, Demin Zhou, and Zyvex Corporation. We especially thank Zyvex Corporation for providing significant funding to support this research.
The reviewers are to be lauded for undertaking a difficult task and should be held blameless for any errors that remain in the manuscript. The authors are solely responsible for all errors of fact or judgment within these pages. Reports of errata may be transmitted electronically directly to the first author at the following email address: rfreitas at rfreitas.com.
We also thank the publisher and staff at Landes Bioscience, especially Celeste Carlton, for their excellent and professional work on this project, and the artist Diego Linares for the excellent cover art.
Robert A. Freitas Jr., J.D.
Senior Research Fellow
Institute for Molecular Manufacturing
Ralph C. Merkle, Ph.D.
Distinguished Professor of Computer Science
Georgia Institute of Technology
Last updated on 1 August 2005
{kind=link}