Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
2.1.2 The Kinematic Model of Machine Replication
The kinematic model is the one people hear about most often in connection with von Neumann’s work on self-replicating machines, probably because it received the earliest attention and publicity [3, 4]. Following his first lectures in 1948 [317] and 1949 [318], von Neumann’s original lecture detailing this model was published [317] in 1951, and in 1955 a further description [243] appeared in the magazine Scientific American, authored by John Kemeny.
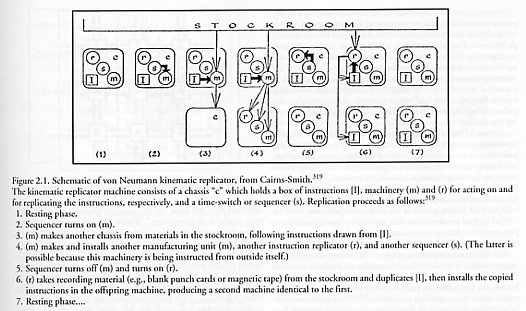
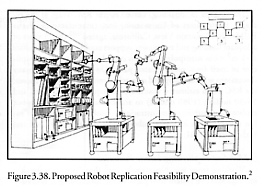
The notion of kinematic machine replication was dealt with only informally by von Neumann. The mathematician envisioned a physical machine residing in a “sea” or stockroom of spare parts (Figure 2.1 and 3.38). The machine has a memory tape which instructs it to go through certain mechanical procedures. Using a manipulative appendage and the ability to move around in its environment, the device can gather and connect parts. The tape-program first instructs the machine to reach out and pick up a part, then to go through an identification routine to determine whether the part selected is or is not the specific one called for by the instruction tape. If not, the component is thrown back into the “sea” and another is withdrawn for similar testing, and so on, until the correct one is found. Having finally identified a required part, the device searches in like manner for the next, then joins the two together in accordance with instructions. The machine continues following the instructions to make something, without really understanding what it is doing. When it finishes, it has produced a physical duplicate of itself. Still, the second machine does not yet have any instructions, so the parent machine copies its own memory tape onto the blank tape of its offspring [278]. The last instruction on the parent machine’s tape is to activate the tape of its progeny.
As Drexler [208] pithily observed: “It may seem somehow paradoxical that a machine can contain all the instructions needed to make a copy of itself, including those selfsame complex instructions, but this is easily resolved. In the simplest approach, the machine reads the instructions twice: first as commands to be obeyed, and then as data to be copied. Adding more data does not increase the complexity of the data-copying process, hence the set of instructions can be made as complex as is necessary to specify the rest of the system. By the same token, the instructions transmitted in a replication cycle can specify the construction of an indefinitely large number of other artifacts.”
Von Neumann’s original kinematic machine was envisioned as consisting of an assembly of electromechanical units resembling transistors on metallic members with electromagnets and sensing pickups [440, 441]. As few as eight different types of elementary parts might be required [3]: four logic elements that receive or transmit stimuli, including (1) a stimulus organ (that realizes the truth function “p or q”), (2) a coincidence organ (“p and q’), (3) an inhibitory organ (“p and not-q”), and (4) a stimuli-producing organ (serving as a source of stimuli); and four mechanical elements, including (5) a rigid member (an insulated girder carrying no stimuli that can form a rigid frame), (6) a fusing organ (which welds or solders two parts together when stimulated), (7) a cutting organ (which unsolders a connection when stimulated), and (8) a muscle (normally rigid, connected to other parts, producing motion when stimulated, and remaining contracted as long as it is stimulated). To acquire the proper parts from the “sea,” the machine would have to contain a device which catches and identifies any part that floats into contact with the device. Von Neumann suggested two stimulus units protruding from the constructing automaton. When a part touches them, tests can be made to see what kind of part it is. For example, a stimulus organ will transmit a signal; a girder will not. A muscle might be identified by determining that it contracts when stimulated.
The memory tape is described [4] as a binary tape made of a zigzag arrangement of the rigid elements (girders). Each intersection holds a binary digit or bit of information: “1” is represented by a protruding girder attached to the intersection, and “0” by the absence of a protruding girder. The replicator can move itself relative to the memory tape by means of kinematic elements. It can change a “1” to a “0” by separating a protruding girder from the tape intersection to which it is attached. It can change a “0” to a “1”, or extend the tape, by sensing a girder floating on the “sea” with a sensor element, picking up the girder, placing it in position using a kinematic element, and connecting it to the tape by means of a fusing element.
This model thus deals with the geometric-kinematic problems of movement, contact, positioning, fusing, and cutting, but still ignores problems of force and energy (especially energy source, absorption, and dissipation). Von Neumann disregarded the fuel and energy problem in his first design attempt, planning to consider it later, perhaps by introducing a battery as an additional elementary component. But the full kinematic machine was never realized in hardware, nor even fully designed, in part because of von Neumann’s premature death in 1957. The total number of machine parts (of at least eight different parts types) in a kinematic replicator was thought to be large, possibly running “into the hundreds of thousands, or millions.” [440]
Von Neumann’s logical organization for a kinematic self-replicating machine is not the only one possible, but probably is one of the simplest ways to achieve completely self-contained machine replication. In its underlying logic it is very close to the way living organisms seem to reproduce themselves [320, 1042]. As is the case with living systems (Section 4.3), the constitutive parts are supplied free to the replicating machine, and those parts are of a relatively high order. That is, the machine dwells in a universe which supplies precisely the sorts of things it needs (Section 5.6) as a kinematic device to make a duplicate of itself – much like living cells residing in a bath of dissolved oxygen, glucose, and nutrients.
Our survey of specific kinematic replicator designs and models is in Chapters 3 and 4.
Last updated on 1 August 2005
{kind=link}
{kind=link}