Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4. Microscale and Molecular Kinematic Machine Replicators
There is substantial interest in examining the feasibility of molecular assemblers as manufacturing systems for nanotechnology. Perhaps the most obvious proof of principle that molecular-scale self-replication is possible at all is the example of biology. Among all “autopoietic” systems (Section 5.1), living things represent a large class of replicators that have been “reduced to practice” in working physical systems, at replicator size scales ranging from tens of nanometers (viruses) to tens of meters (whales). The techniques of biotechnology are regularly used to alter both structure and function of cellular replicators, producing biological kinematic replicators altered to specifications determined by human bioengineers. The first references to “molecular automata” began appearing in the early 1960s [1315, 1316]. There are many individual molecules known to be capable of self-replication, and both self-assembly and positional assembly are employed inside living cells as they replicate. Many nonbiological molecular or microscale replicators have been suggested, including several proposals for replicators using molecular-scale positional assembly to be made of extremely durable nonbiological materials such as diamond. These latter replicators are called molecular assemblers, an important subject of this book.
The authors are most interested in the subject of nanomechanical replicators. As noted by Aristides Requicha, Director of the Laboratory for Molecular Robotics at the University of Southern California, in 2003 [1317]: “Construction of nanorobots and NEMS [nanoelectromechanical systems] is still in its infancy. However, progress in exploiting biological motors and in developing artificial nanomachines has been rapid over the last few years, and the first (and fairly primitive) nanorobots are likely to emerge from research labs within the next five to ten years. Building and testing of nanodevices, and coupling of nanodevices to build integrated systems that can be interfaced with the micro/macro world continue to be major challenges.”
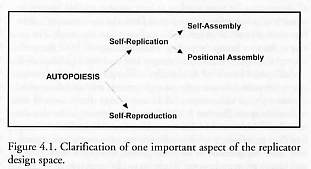
In this Chapter, we review a variety of microscale and molecular kinematic replicators that have been proposed, or have been discovered or realized in physical implementations. However, before proceeding further it is necessary to clearly distinguish three terms (Figure 4.1) that are frequently confused:
Self-replication: the end result of a virtual or physical construction* process in which an object (called a “replicator”) makes as true a copy of itself as possible [705]. Depending upon the nature of the object and the environment in which it resides, many different construction processes might be employed to achieve this final result. One such construction process (resulting in self-replication) might be self-assembly. Another such construction process (also resulting in self-replication) might be positional assembly. (“Self-replication” is to be distinguished from “self-reproduction”, a process in which an object makes imprecise copies of itself that may incorporate heritable variation of sufficient magnitude to allow natural selection and evolution to occur [200, 2430].)**
* In traditional engineering, “construction” refers to the manufacture of physical objects using the techniques of fabrication, assembly, or both. “Fabrication” customarily refers to materials transformation processes involving the alteration of interatomic strong (covalent or ionic) bonds within a single component (e.g., chemical, phase, or deformative transformations), whereas “assembly” customarily refers to the spatial rearrangement of fabricated components or “parts” that involve no alteration of interatomic strong bonds within the components (e.g., pressure-fitting, snap-fitting, fastening, weaving, complementary interlocks) but may involve altering atomic bonds between components (e.g., adhesives, joining of unterminated diamond surfaces). When components shrink to the size of atoms or molecules, the distinction between fabrication and assembly disappears. For convenience we choose to label such transformative processes as assembly, e.g., “molecular assembly,” though “molecular fabrication” would be equally apt.
** There is some subtle dissent from this approach. For example, Gerald Joyce [601] is of the opinion that “most biochemists would disagree with the distinction that is being made between ‘self-replication’ and ‘self-reproduction’. Instead they would distinguish between ‘error-free self-replication’ and ‘error-prone self-replication’.”
“Replication” is also sometimes distinguished from “self-replication” in that the former describes a general ability to copy some range of physical structures [1318] while the latter may describe the more narrow ability of a system to copy its own physical structure. These terms are used almost interchangeably in this book because analysis reveals that this distinction actually extends along several different dimensions of the replicator design space (e.g., dimensions I6, I7, I16 and J6; Section 5.1.9) and thus may more easily lead to confusion than enlightenment; hence the distinction seems not particularly useful in normal discourse.
For instance, the word “self” may refer to the thing being made – that is, to the fact that the entity in question is making copies of its own physical structure, rather than the physical structure of something entirely else, or even imperfect copies of itself. Or “self” may refer to the way a thing is being made – that is, the ability of an entity autonomously to make copies on its own without outside assistance, as opposed to some other replicating entity which can only replicate with the assistance of outside entities. This usage of “self” would then be synonymous with closure, with a “self-replicator” having 100% closure while an ordinary “replicator” would not. Since few replicating entities can have 100% closure in all dimensions (in time needing at least some materials, energy, or sensory or other information inputs from the environment), then few entities could be called “self” replicating in this usage. For example, human beings, requiring Vitamin C inputs from the environment, lack 100% materials closure and thus would be excluded.
Still others have tried to identify “self” replication with descriptive information closure only, or with process control information closure only, or with others of the many design dimensions of the replication space (Section 5.1.9). Rather than trying to burden the term “self” with some arbitrary meaning that is more likely to confuse than to inform, we feel it is best to treat the terms “self-replication” and “replication” as interchangeable, and direct readers who seek clarification and greater precision to our comprehensive replication design space analysis (Section 5.1.9), where said readers can then select whichever conceptual restrictions seem most appropriate under the circumstances. Similar comments pertain to the usage by some writers of “auto-” in place of “self-”.
Self-assembly: one of several construction processes by which self-replication may be achieved; an alternative to positional assembly. Self-assembly is a stochastic process wherein only the final state (the desired end configuration), and not the pathway taken to it, is specified [1319]. Molecular self-assembly is a strategy for nanofabrication that involves designing molecules and supramolecular entities so that shape- and charge-complementarity causes them to spontaneously aggregate into desired structures [1326]. “Self-assembly” thus refers to a process in which a construction occurs spontaneously and stochastically “by itself,” but does not necessarily refer to a process in which a construction results in a duplication of a selfsame device. Indeed, the result of self-assembly is frequently a much larger compound object markedly different from the original smaller component objects that have self-assembled. Pier Luisi [1320] believes that the term “self-assembly” should be reserved “either to spontaneous processes, i.e. those under thermodynamic control; or those that are generated by the internal laws of the system (like the construction of an ant nest, determined by the inner genome of the species).” Self-assembly can also be defined as the reversible formation of a supramolecular structure (or complex) from two or more molecular components via one or more noncovalent interactions including electrostatic, H-bonds, or van der Waals interactions.
Whitesides [1321] notes that “self-assembly” has been deemed to include processes ranging from the non-covalent association of organic molecules in solution to the growth of semiconductor quantum dots on solid substrates, but prefers to limit the term to “processes that involve pre-existing components (separate or distinct parts of a disordered structure), are reversible, and can be controlled by proper design of the components.”
Positional assembly: one of several construction processes by which self-replication may be achieved; an alternative to self-assembly. Positional assembly is a deterministic process in which the components used in a construction are held in known positions and are constrained to follow desired intermediate physical pathways throughout the entire construction sequence. (Like self-assembly, the final state or desired end configuration is also specified.) Positional assembly is useful whenever reacting structures might have prematurely reacted elsewhere if not positionally constrained. The use of highly reactive compounds permits a simple and direct synthetic process that provides greater flexibility and makes possible the synthesis of a much wider range of structures than is possible using self-assembly alone. (For example, attempts to reliably self-assemble highly reactive components, even if chemically distinct, must fail when those components collide with each other in undesired but still reactive conformations – although competing reaction barriers can increase the probability of correct assembly in some instances, most notably complementary DNA strands.) The result of positional assembly may be an object physically different from the original object that performed the positional assembly construction process, or it may be an object that is a close physical duplicate of the original object that performed the positional assembly construction process. A macroscale analog is the part-by-part assembly of automobiles on a robotic production line while maintaining continuous positional control [1322] of all parts and processes.
Before proceeding further, one additional point must be made. The last half of Chapter 4 presents a number of hypothetical designs for kinematic self-replicating machines which run considerably ahead of full experimental verification. There are justifiable and pragmatic concerns that “the principle has gotten so far ahead of the practice” that these theoretical designs may no longer be well-grounded in reality, or that as practice slogs along behind theory, technical issues might arise that could have significant impact on the details of these designs. While this is an important caution to bear in mind, still it seems unlikely that we will ever be able to build an assembler in the absence of a design for one. Trial designs are an important part of common engineering practice and are useful for uncovering previously hidden design flaws. It is also unlikely that a molecular assembler will soon be built if such construction is generally regarded as impossible within the engineering and scientific community. In the absence of an experimental ability to build a complete system today, it is nevertheless fruitful to examine a wide variety of intermediate designs to help identify components or processes that might be susceptible to near-term experimental or computational validation, with a view toward reducing the remaining uncertainties and unknowns involved in such designs. Concerned readers may wish to briefly detour to our extensive discussion of these issues in Chapter 6 before confronting the balance of Chapter 4.
Last updated on 1 August 2005
{kind=link}