Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.9.C Replication Substrate
C1. Substrate Physicality. A virtual environment, which is purely computational, in fact also takes place in a material substrate, either a computer memory (based on silicon chips), or in our brain (based on neurons). However, replicators existing in such an environment are not kinematic replicators because their components do not engage in physical movements through space. This factor is interdependent with replicator physicality (see D1).
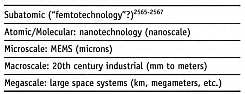
C3. Substrate Technology Level or
Granularity.
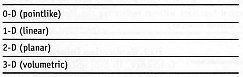
C4. Substrate Physical Dimensionality.
This refers to the dimensionality of the portion of the substrate that is relevant
to the productive part of the replicator’s operations. Processes that
take place on tool tips are pointlike (0-D), even though the tool as a whole
might move through space in multiple dimensions with multiple degrees of freedom.
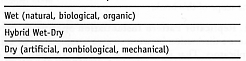
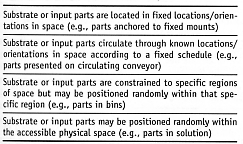
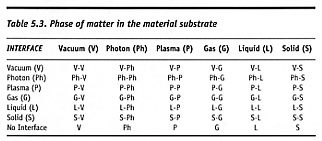
C5. Replication Substrate Phase.
Replication takes place in some medium, or at the interface between two or more
different media (see also “L6. Environmental
Partitioning”). This dimension to some extent substitutes as a variable
describing the relative randomicity of parts orientation in space or “jumbleness”
of the parts presentation to the replicator ingestor subsystem (see Table
5.3) (see also “C10. Entropy of Substrate”).
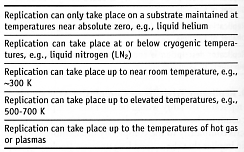
C6. Replication Substrate Temperature. At what temperature may replication take place on the given substrate? For example, if sufficient precision and reliability in diamond mechanosynthesis cannot easily be achieved at room temperature [2325], then colder substrates (e.g., LN2 temperature) may be required, further limiting the risks of runaway replication in the natural environment (Section 5.11).
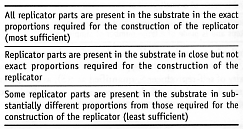
C7. Substrate Sufficiency.
One simple quantitative measure would be a dimensionless ratio for each parts
type, defined as the relative concentration of a given part present in the substrate
divided by the relative concentration of the given part in the replicator. This
is a measure of how well the parts content of the substrate matches with the
materials input requirements of the replicator, similar to the “extraction
ratio” described by Freitas in 1980 (Freitas [1014];
Freitas and Gilbreath [2], Section 5.3.6). For
example, if a given part represents only 1% of the input substrate by volume,
but that same part represents 10% of the volume of the replicator, then the
substrate sufficiency for this part would be 1%/10% = 0.1, or 10%.
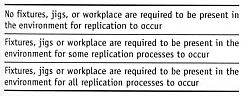
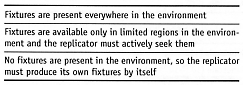
C8. Environmental Fixture Requirement.
The first teleoperated self-replicating machines constructed by Suthakorn [1284-1290]
using LEGO® blocks required fixtures present in the environment to assist
in parts-assembly processes. Similarly, Sayama [8,
9] suggests including the construction of a replicator
“workplace” as an integral part of the replication program in order
to “enhance the robustness of self-replication processes...in our real,
three-dimensional kinematic universe.” (See also dimension I10
below.) In ecology, this procedure is known as “niche construction”
[2513], as typified by the hive-building
activities of bees or the dam-building activities of beavers. In reproductive
physiology, the eggshell produced by bird or reptile parents serves “to
stabilize the process of offspring construction by isolating it from the outside
and holding it on a solid structure,” and the uterus of mammals during
reproduction similarly represents a workplace that “is included in the
parent’s body, but can be refurbished and extended as needed to hold its
offspring while they are under construction.” [8,
9] Berkeley [182]
also informally suggested the use of a robot “birth factory” for
robot reproduction, in 1972.
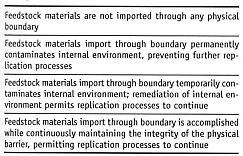
C9. Feedstock Import through Boundary.
“Feedstock” constitutes all material inputs to the system, including
materials whose atoms are destined for incorporation into finished products
or temporary fixtures as well as other material inputs that might be used to
supply energy, information, etc.
C10. Entropy of Substrate.
How disordered are the inputs that are presented to the replicator for assembly?
See also B10.
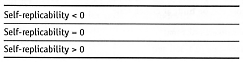
C11. Self-Replicability.
Adams and Lipson [272, 2514]
have proposed a universal, continuously valued property of the interaction between
a system and its environment, called self-replicability, representing the effect
of the presence of such a system upon the future presence of similar systems.
Their objective is to put self-replication on an algorithmically calculable,
quantifiable, and continuous logarithmic scale that facilitates comparisons
– both between the same system in different environments (determining
ideal environments for a system’s replication) and between different systems
in the same environment (if optimizing self-replicability in a given environment
is desired). Rather than viewing self-replicability as a property purely of
the system in question, Adams and Lipson correctly view it as a property of
the interaction between a system and its environment. They define replicability
as a property relative to two different environments, which indicates the degree
to which one environment yields a higher presence of the system over time. Self-replicability
is then a comparison between an environment lacking the system and an environment
in which the system is present [272]. A specific
mathematical formula (too lengthy to detail here) is derived that can be universally
applied to systems from cellular automata to living systems. Say the authors:
“The flexibility of calculation reflects the idea that replication is
a property of the information tied up in the interaction between a system and
its environment, rather than in either one or in the specific physical makeup.
Also, the crystal model in particular demonstrates how self-replicability succeeds
in coinciding with intuition: The more likely it is for a system to manifest
regardless of having been present before, the lower its self-replicability will
be; conversely the more unusual and unlikely a system is which is capable of
replicating its existence, the higher its self-replicability.”
C12. Fixture Acquisition.
If fixtures are required, how are they obtained by the replicator?
Last updated on 1 August 2005
{kind=link}