Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
2.3.5 Machine Replication without Description
In the machine replication schemes examined thus far, some arbitrary part of the machine which cannot be inferred is always made explicitly available in memory initially, or is implicitly made available in memory or for inspection by means of an internal wired-in memory, also not directly accessible. Laing [560] showed that even this wired-in description is not necessary. In effect, a machine can carry out a self-inspection which can yield a description which in turn can be made available to the machine in constructing a duplicate of itself.
The process begins with a wired-in construction routine which produces a semiautonomous analyzer machine. This analyzer moves over the original machine and identifies the type and location of its componentry. This is reported back to the original machine, which uses this information to make a duplicate of itself. Thus, though it may be that a part of a machine “may not comprehend the whole” in a single cognitive act, a part of a machine can examine in serial fashion the whole machine, and in time can make this information available to the machine for purposes of replication. In other words, if the structure of a parent automaton can be inspected and thus can serve as the blueprint for its offspring, then the system can transfer the parent’s information to its offspring.
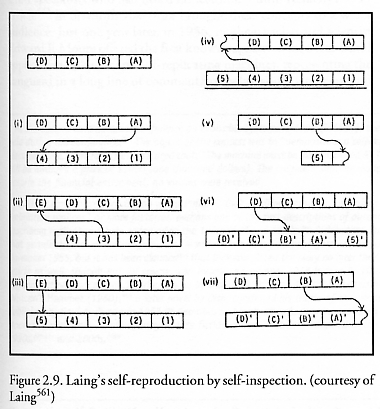
In the example of self-inspection shown in Figure 2.9, the initial automaton configuration is (D) = general-purpose constructor, (C) = optional substring, (B) = destroyer, and (A) = special-purpose constructor. According to Laing [561], the process proceeds as follows:
i. (A) constructs (1) analyzer, (2) inferrer, (3) general-purpose constructor, and (4) destroyer.
ii. analyzer (1) identifies the primitives of (A), (B), (C), and (D); inferrer (2) uses this information to instruct general-purpose constructor (3) to produce (E), the emitter of a description of (A), (B), (C), and (D).
iii. the emitter (E) produces the description (5) of (A), (B), (C), and (D).
iv. destroyer (4) removes the emitter (E)
v. destroyer (B) removes (1), (2), (3), and (4).
vi. constructor (D), using description (5), produces (A)’, (B)’, (C)’, and (D)’.
vii. destroyer (B) removes description (5).
Self-replication of the original automaton is now complete, solely via an examination of its structure. “Whatever properties the original possessed at the time of reproduction are now recreated in the offspring ... a model of reproduction in which the use of a distinct description is not central to the process and in which any acquired characteristics of the original parent string would be reproduced in the offspring string.”[561] In other variants of this system, “the information acquired by the new analysis string need not be temporarily stored in the description and emitter of a description, but is acted upon as it is acquired. Machine reproduction by self-inspection without creation and destruction of auxiliary strings can [also] be exhibited in the kinematic system.”
Replication by self-inspection [560-563, 374] can allow the description of the machine which is to be replicated (i.e., the “phenome”) to be dynamically constructed concomitantly with its interpretation. Laing [561] notes that the capacity of a system generally to explore its own structure and to produce a complete description of itself for its own perusal and use (e.g., to generate and evaluate behavioral options open to it) seems to be an advantageous capacity not exhibited anywhere in naturally occurring systems. Of course, self-inspection becomes increasingly difficult as replicating systems grow in complexity [2382], and also when the system being inspected cannot enter a state of stasis [572]. As Friedman [573] points out, “self-inspection might be practical for cellular automata – where the machine is entirely within the information domain – or with von Neumann’s ‘sea of parts’ – where all the subassemblies can be identified merely by reading a part number or a serial number. [But] with the ‘moles of parts’ that are claimed for MNT [molecular nanotechnology], I can’t conceive how the self-inspecting sensors can gain access to the internal structure – which is most of the machine to be self-replicated.”
Peter Silcox [574] also warns that self-replication by self-inspection is potentially evolutionary, since self-inspection provides a ready means by which phenotypic variation can become incorporated into future generations of the replicator. If one such random variation happened to disable a subsystem whose primary function was to prevent evolution, the subsequent line of replicators could become unconstrained in their replicative behaviors, violating our desire for inherently safe replication. This implies that replication controls on self-inspecting replicators should be distributed in multiple sites throughout the machine, such that the loss of function or outright omission of these controls during construction of daughter machines will result in nonfunctional daughter machines.
Interestingly, Chirikjian [1297] has proposed a partial “replication without description” approach as a way to save mass, and hence transportation costs, in the context of a lunar self-replicating factory whose initial “seed” must be sent from Earth. A crucial subsystem in Chirikjian’s hypothetical factory (Sections 3.24 and 3.25.2) is an electromagnetic railgun to widely disperse replicated daughter units across the lunar surface. However, the components for even a single railgun in an initial seed factory would be unduly massive (hundreds of thousands of tons), hence prohibitively expensive to transport from Earth. The solution is to include only a few representative components of the railgun system with the initial seed that is landed on the Moon. The initial seed factory then makes negative castings of these components in situ, producing templates which can be used to cast thousands of copies of the heavy components in metal, on the Moon.
Suthakorn and Chirikjian [2341] have also demonstrated a non-von-Neumann architecture for the replication of a LEGO®-based transistor circuit by active self-inspection. “There are no instructions stored about how to construct the circuit, but information observed about the spatial organization of the original circuit is fed into the circuit itself to provide assembly commands. The circuit then drives a larger electromechanical (robotic) system in which it is embedded to cause the production of a replica of the original circuit. In the current context, the electromechanical hardware is viewed as a tool which is manipulated by the control circuit for its own reproduction (much in the same way that deer living in a forest can reproduce without an associated reproduction of the forest itself).”
Last updated on 1 August 2005
{kind=link}