Following in the tradition of the 1980 NASA study of self-replicating
lunar factories (Section 3.13), Gregory Chirikjian et
al [980] at Johns Hopkins University has further
examined the utility and implementation of such missions, which could produce
both energy and materials on the moon. Notes Chirikjian: “When self-replicating
robotic factories take hold, the moon will be transformed into an industrial
dynamo. The resulting refined materials and energy that will be produced on
the moon will then provide capabilities for the exploration and colonization
of space that could never exist otherwise. But the moon’s resources cannot
be exploited in a practical way by directly launching massive production facilities
there. Hence, self-replicating systems are essential.
“In self-replicating systems, one or more functional
robots assemble copies of themselves. The replicas may then act together as
a swarm, or not. The [research] goal is modest: Design a simple self-replicating
robot that (perhaps in collaboration with other robots of the same kind) will
assemble a replica of itself from rigid components with geometric features that
can be produced by casting molten material in a mold. While this method of component
manufacturing is not the only one, it is easy to imagine that castings can be
used to make new molds, and the new molds can in turn make new castings. Hence,
this method of component production lends itself to overall system self-replication.
In contrast, another manufacturing technique such as laser sintering could be
imagined, but this would require the ability to reproduce a laser. No such need
exists for casting.” This is a departure from Freitas’ NASA design
(Section 3.13.2.2) which included both casting and
laser sintering in the parts fabrication subsystem.
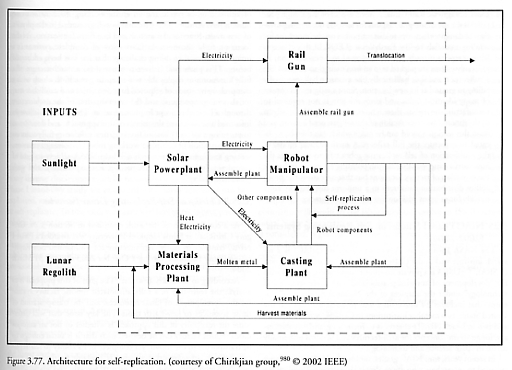
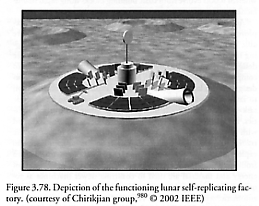
The overall architecture for Chirikjian’s self-replicating
lunar factory is shown in Figure
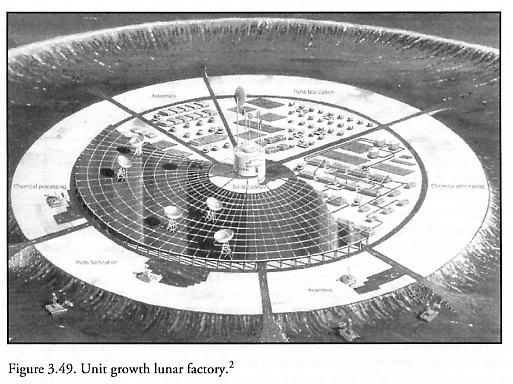
3.77; an artist’s conception of the factory (Figure
3.78) is reminiscent of the earlier NASA work (Figure
3.49). There are four key subsystems in the Chirikjian lunar factory [980]:
Multifunctional Robots. These robots
can assemble copies of themselves given a complete set of unassembled parts.
Each robot may consist of a mobile platform as a base with attached manipulation
devices, and will not only assemble replicas of themselves but also can be
used to assemble the other three subsystems from their components. The addition
of a suite of tool fixtures allows these robots also to be used for mining
and local transportation of materials and components between subsystems within
the ~1 km region of the lunar surface occupied by one factory site.
Materials Refining and Casting Facility.
This subsystem takes in the strip-mined lunar regolith, melts it using power
produced by the energy subsystem, and separates oxygen from the silicon, aluminum,
and iron oxides that are plentiful in the regolith. These molten materials
are then separated and fed into molds formed from sintered regolith. The resulting
castings serve as components of new copies of all four subsystems.
Solar Energy Conversion, Storage and Transmission.
The lunar factory uses both photovoltaic cells and solar radiation reflected
and concentrated by mirrors. Photovoltaic cells power the robots, the rail
gun subsystem, and also the electrolytic separation of elemental metals from
oxides in the materials refining facility. Since the energy generated by one
factory will be far in excess of the power requirements of the factory’s
own self replication needs, so the excess energy could be transmitted to low-earth-orbiting
satellites using microwaves. Energy storage is provided by fuel cells assuming
sufficient water or elemental hydrogen exists, or by other alternatives.
Electromagnetic Rail Guns. A novel aspect
of this design proposal is the use of integral railguns for long-distance
transportation of daughter factories to distant points on the moon, or for
sending materials to low Earth orbit (LEO). In this concept, when a replica
is ready to be transported to a new location, all of its subsystems are packed
into an iron casing, accelerated like a bullet train and shot ballistically
like a cannon ball, eventually falling to ground at its new location. Since
a railgun can consist of many identical units, and since the gun is not required
to manufacture the replica, there is no need to send a whole railgun to the
moon. Only one section of the railgun need be sent, and from this section
a mold can be made which can then be replicated to construct the full railgun.
A mathematical model of the proliferation of self-replicating robotic factories
across the lunar surface suggests that railgun pointing errors can influence
the evolution of factory locations but that over time, the probability distribution
converges to a uniform distribution more quickly for railguns with noisier
pointing accuracies.
{kind=link}
{kind=link}
{kind=link}