Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.17 Zyvex Exponential Assembly (2000)
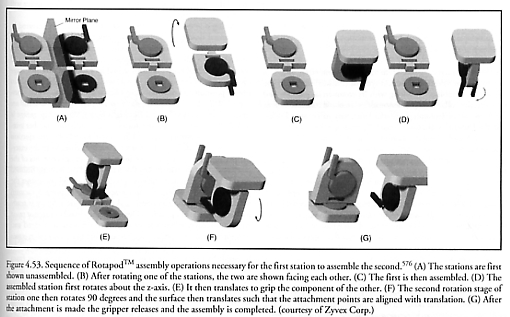
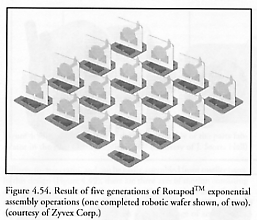
At the micron scale, using existing MEMS (microelectromechanical systems) technology, Zyvex Corp. has designed simple pick-and-place robotic arms that could pick up relatively complex, planar, micron-scale parts made using lithographic techniques and then assemble those planar parts into simple three-dimensional robotic arms that have the ability to pick up specially designed MEMS parts. In Zyvex’s RotapodTM exponential assembly design [576], this replicative technology starts with a single robotic arm on a wafer (Figure 4.52) that makes a second robotic arm on a facing surface by picking up miniature parts — carefully laid out in advance in exactly the right locations so the tiny robotic arm can find them — and assembling them (Figure 4.53). The two robotic arms then make two more robotic arms, one on each of the two facing surfaces. These four robotic arms, two on each surface, then make four more robotic arms. This process continues with the number of robotic arms steadily increasing in the pattern 1, 2, 4, 8, 16, 32, 64, etc., until some manufacturing limit is reached (e.g., both surfaces are completely covered with tiny robotic arms). This is an exponential growth rate, hence the name exponential assembly, but the assembly process requires (among other things) lithographically produced parts as well as externally provided power and computer control signals to coordinate the complex motions of the robotic arms. Thus this approach is an example of both the broadcast architecture (for instructions) and the vitamin architecture (for parts and energy) being employed in a single system. As a result, this system is very “inherently safe” (Section 5.11).
While a general purpose robotic arm having six degrees of free movement (like human arms and hands) would be able to pick up parts and position them in any orientation and position desired, such a general purpose arm is harder to make. Zyvex’s simpler RotapodTM design uses robotic arms having only two rotational degrees of freedom and a gripper (Figure 4.52), while offloading three degrees of freedom to the external environment: the surfaces on which the parts are arrayed can be moved in X, Y and Z, providing a total of five degrees of freedom for each robotic arm, with the three translational degrees of freedom being shared across all the robotic arms on a surface. Externally provided power and computer control cause all the robotic arms on a surface to operate synchronously and in parallel.
Exponential assembly can be implemented on many different length scales. Given existing manufacturing capabilities, it should be possible to implement exponential assembly using MEMS technology with device sizes measuring tens or hundreds of microns and feature sizes of about one micron. Each rotational degree of freedom could be implemented using a planar rotating stage produced using standard lithographic techniques. Two such rotating stages can be attached at right angles, providing the desired two degrees of rotational freedom for this assembly station. A gripper attached to one rotating stage completes the basic design. Assembly of the first robotic arm could be done manually using Zyvex’s MEMbler™ conceptual MEMS assembly station [2332]. Having assembled the first robotic arm, the RotopodTM could then assemble further robotic arms in exponentially increasing numbers (Figure 4.54), as illustrated in an animation [2333]. In 2003, a patent “Method and System for Self-Replicating Manufacturing Stations” (#6,510,359) for this manufacturing system was issued to Zyvex by the U.S. Patent Office [273]. A crudely analogous electrophoretic system for stepwise exponential growth of DNA-based chemical replicators using pairs of alternating opposed deposition surfaces has been proposed by von Kiedrowski’s group [1362, 1428-1430].
In 2001, Zyvex was awarded a $25 million, five-year, National Institute of Standards and Technology (NIST) Advanced Technology Program government contract – to develop prototype microscale assemblers using microelectromechanical systems (MEMS), extend the capabilities to nanometer geometries, and then to develop nanoelectromechanical systems (NEMS) for prototype nanoscale assemblers [2247]. Along with its commercial partners and its university collaborators (Rensselaer Polytechnic Institute Center for Automation Technologies [57], the University of Texas at Dallas, and the University of North Texas), Zyvex hopes to accelerate the production and commercialization of low-cost assemblers for micro- and nanoscale components and subsystems. The ultimate program goal through 2006 is nothing less than automated micro- and nano-manufacturing – the design and construction of assemblers capable of handling thousands of sub-micrometer components at high speed, using MEMS to prototype systems which could then be built at relatively low cost. Zyvex engineers are conceiving and testing various manufacturing architectures that someday might lead to the massively parallel construction of large batches of identical molecular machines simultaneously. This could allow vast numbers of nanodevices and nanorobots to be produced to precise molecular specifications, relatively inexpensively.
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}