Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.21 Bereton Self-Repairing Robots (2000-2004)
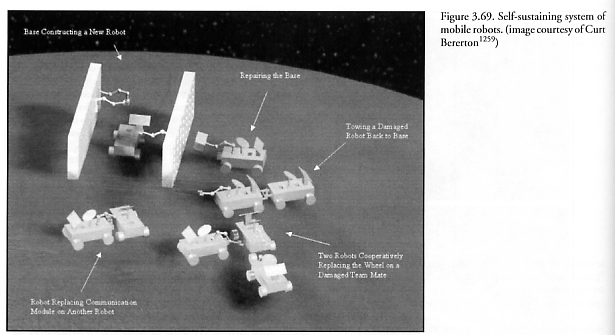
Curt Bererton, in early 2004 a Ph.D. candidate at Carnegie Mellon University, is investigating the design and potential utility of robots capable of self repair or cooperative repair [1259-1262]. Research issues include: (1) What are some general design rules for repairable robots? (2) How can we quantify the performance of different robot teams? (3) What is the best way to achieve cooperation in a team of robots? (4) Is there a principled way in which multi-robot planning can be achieved? Bererton is most interested in self-sustaining systems – that is, systems that can operate in the absence of humans for extended periods of time – and in creating robots that can truly repair each other and exist as a self-sustaining robot colony. Figure 3.69 is a “concept picture” showing examples of useful capabilities in such a colony reminiscent of several “replicating lunar factory” proposals (e.g., Sections 3.13, 3.24, 3.25 and 3.29). Many of these capabilities – including “constructing a new robot” or (at least partial) self-replication – would also be useful in applications other than space missions.
Bererton believes that “robots will become an integral part of human society much like computers are today. To reduce the amount of down time in robotic factories, mines, and robot activity in general, robots should and will repair other robots,” saving time and money, and keeping critical infrastructure well maintained. “Clearly, many of these activities won’t be seen on commercial robots for some time. It will begin with self-diagnostics that pinpoint malfunctioning components for a human repair technician. A great example of this kind of technology can be seen in modern printer/photocopying machines which indicate the location and repair procedure for stuck paper faults, open doors, lack of toner, and many other kinds of errors. One of the first capabilities I expect to see is for robots to be able to tow each other reliably to either an automated repair facility or to a capable human repair technician.”
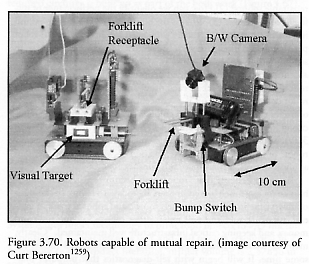
Bererton has designed and built two simple robots (Figure 3.70) which are capable of mutual repair [1260-1262], in which all of the electrical modules can be swapped out using a forklift type mechanism. These robots, the first of their kind ever built [1261], worked well; videos are available online [1263].
These robots exhibit several key capabilities required for a repairable robot team, including fault detection, diagnosis, and repair steps. The design concentrates on maximal re-use of existing components by having robots repair each other. Notes Bererton [1259]: “The construction of these robots proved a point. When I began my research on repairable robots I encountered much skepticism regarding whether or not robots with cooperative repair capabilities could ever be created. With these robots I demonstrated that such capabilities were not only possible, but that they could be achieved using technology available at the time [and] that repairable robots aren’t as far away as some would believe.”
Last updated on 1 August 2005
{kind=link}
{kind=link}