Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.29 Self-Replicating Robotic Lunar Factory (SRRLF) (2003-2004)
Two private groups [1313] devoted to space colonization have undertaken the design of a self-replicating robotic lunar factory (SRRLF) with the ultimate objective of constructing several operative space manned stations having room for thousands of inhabitants in a 3-4 decade timeframe. The lunar factory replicator, besides replicating itself, will also produce an additional quantity of materials for export to Earth or lunar orbit. This ongoing volunteer open-source design effort is explicitly intended as an update and extension of the 1980 NASA replicating lunar factory study (Section 3.13.2) and thus the two designs have many similarities.
Valenti Pineda [1314], an industrial robotics and automation engineer in Spain who is leading the technical design effort, notes that the technology needed to transport a SRRLF to the Moon was proven well over 30 years ago. The technology in robotics and automation needed to successfully operate a prototype lunar factory simulator on Earth is now powerful enough to build it and to produce the required software and know-how to operate the factory on the Moon. “My estimate is a SRRLF can be designed using current robotic technology with the target of reaching 99% self-replication by weight, then begin the battle of reducing the remaining 1% that would be difficult to self-replicate using current technology,” says Pineda [1314]. “In any event, this 1% consists of small and relatively lightweight components and wouldn’t be prohibitively expensive to import from Earth – e.g., control electronics, communication equipment, lubricants, dopant for solar cell production, etc.”
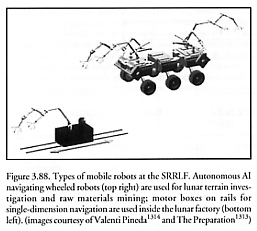
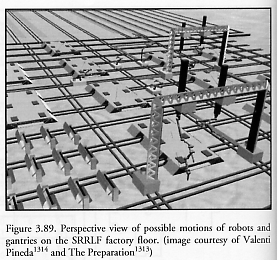
The factory is being designed so as to make robotic work as reliable and easy as possible. For example, to make robot transportation and locomotion easy and reliable, robots engaged in lunar soil mining operations will run on wheeled structures adaptable to lunar soil and will have autonomous AI navigation (Figure 3.88). Robots that must run inside the factory are mounted on motor boxes and move along an internal railroad (Figure 3.89), with navigation determined by a single-dimensional positional key. The factory consists of several modules partially buried in the lunar soil and connected at factory soil level by railroads where the displacement along railroads from any factory floor location to any other floor location is known to robots and payloads. The floor of the lunar factory is made of sintered lunar regolith. The modules of the first factory are delivered from Earth and assembled at a site previously founded and excavated by robots. Multifunctional robots are the workforce in the factory for all required industrial tasks such as welding, visual inspection, assembling, and so forth. The robots must be designed not only to carry out these tasks but must also be maintained, repaired, mounted and replicated by themselves using the least possible number of different types of parts.
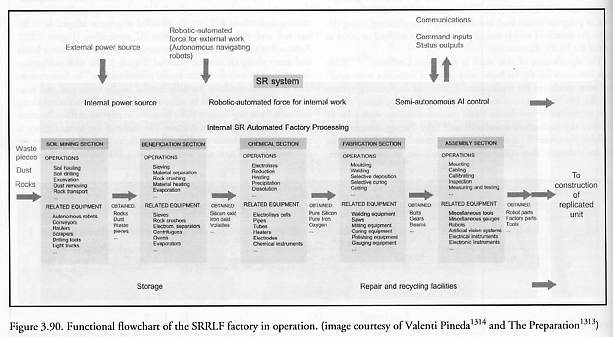
The phases for SRRLF construction are as follows: (1) selection of lunar landing site; (2) excavation, founding and factory floor construction by assembly of sintered regolith blocks and rails; (3) deployment and assembly of factory equipment; and finally (4) factory startup. As indicated by the flowchart in Figure 3.90, the factory consists of the following processing modules, listed in order of operation:
o Autonomous wheeled robots for lunar soil mining deposit excavated materials in light trucks that run along the central railroad to the factory.
o Raw materials go to solar ovens and materials separators.
o Preprocessed materials go to chemical processing sector where primary materials will be obtained; unusable portions of these materials go to the factory dump.
o Primary materials move to the fabrication sector to be turned into useful mechanical and electrical pieces.
o Fabricated pieces move to the assembly sector where subassemblies are made and inspected for quality before being sent on for final assembly.
o Logistical planning requires the use of specific sites for storage, recycling, repair, and maintenance of pieces and equipment inside the factory.
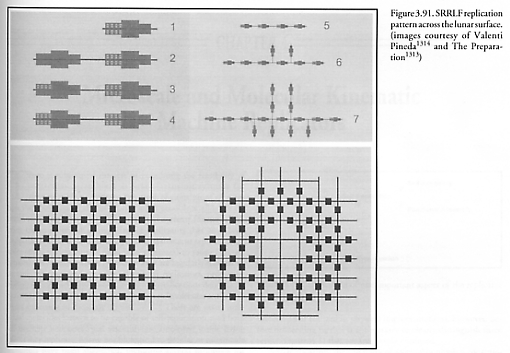
Two central rails will be continually enlarged by construction using processed material within the factory, making it possible for robots to travel faster to distant mining sites and to deliver mined materials back to the factory. Separate replicated factories are connected among themselves by these rails. In the progressive replication pattern illustrated in Figure 3.91, the first factory (1) constructs the central rail and foundation of the second factory, then (2) installs early modules and (3) solar power arrays, and finally the rest of the components of the second factory (4). (Precise distances between daughter factories may vary depending on materials needs, site details, etc.) The first two SRRLFs then generate one daughter each (5); then all four replicate to make 8 units (6), and then produce a total of 16 units after the next replicative cycle (7). Once the number of replicators is large enough and the earliest mining sites have been exhausted, sending raw materials to the earliest factories may delay replication so it is better to dismount the robotic modules from these early factories and transport them to peripheral mining sites, leaving the vacated interior spaces for future human settlements.
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}