Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.9 Freitas-Merkle Map of the Kinematic Replicator Design Space (2003-2004)
Taking the broadest possible view, a manufacturing system is a physical system that can make other physical systems. Manufacturing systems potentially can only make either (or both) of two kinds of things: (1) self (another manufacturing system), or (2) non-self products. A kinematic replicator is an example of a manufacturing system. More specifically, a kinematic replicator is a manufacturing system that can make an architecturally identical copy of itself. This logically defines three broad classes of manufacturing systems:
(1) Productive Nonreplicators – manufacturing systems that can only make non-self products. These systems cannot make copies of themselves and are not replicators. This class of manufacturing system represents essentially all of today’s factory/distribution-centered industrial machinery, and may also characterize early nanoscale- or nanostructure-manufacturing product lines, whether employing self-assembly or positional assembly processes (Chapter 4), as well as future highly specialized nanomanufacturing systems.
(2) Nonproductive Replicators – manufacturing systems that can only make copies of themselves. These purely parasitic systems are inherently useless from a societal or commercial standpoint, and should in most cases prove brittle when the environment (in which replication must occur) changes. Viruses are an example of nonproductive replicators in biology.
(3) Productive Replicators – manufacturing systems that can make copies of themselves and can also make non-self products. These are the factory systems of the future. As Bradley (Section 3.12) has already noted, the process of replication in most cases will use only “a vanishingly small fraction of total capabilities” of a replicator – that is, most of the practical operational space of a replicator is likely to be the ability to manufacture non-self products.
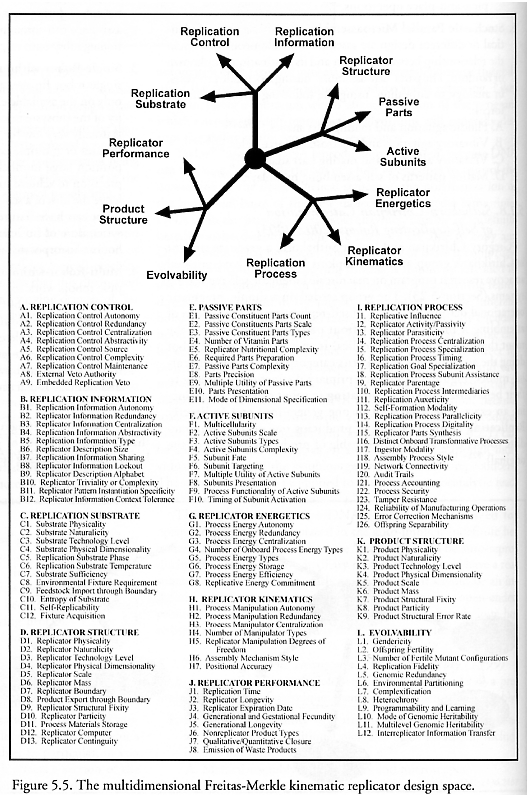
The ability of productive replicators to make both self and non-self products – one basic measure of replicator performance – constitutes but a single dimension (i.e., J6 on our map) within an enormously vast multidimensional replicator engineering design space. The distinction between individual and factory replicators is another dimension (I4) in the space. We have identified 137 practical multivalued replicator design properties which may be grouped into 12 primary design dimensions in four principal categories (Figure 5.5):
Inputs: (A) Replication Control, (B) Replication Information, (C) Replication Substrate
Structure: (D) Replicator Structure, (E) Passive Parts, (F) Active Subunits
Function: (G) Replicator Energetics, (H) Replicator Kinematics, (I) Replication Process
Outputs: (J) Replicator Performance, (K) Product Structure, (L) Evolvability
While many of these dimensions are independent, some are quite strongly interdependent and other dimensions identify characteristics of replicators which are useful but might not be necessary in all designs. Nevertheless, each item captures an important and distinct aspect of replicator design and performance.
The basic replication model followed here is that of a physical replicator device that uses external resources (called the “substrate” or “environment”, which may provide energy inputs and raw materials feedstock) to make a daughter device, and possibly also to make non-replicator products. Each of the practical design properties (which may be interdependent or mutually exclusive) that define our 137-dimensional replicator design space are briefly identified below. Our design space at minimum identifies >1070 theoretical distinct replicator subclasses. Clearly the design space for kinematic replicators, as detailed below, is truly vast and has only been lightly explored via systematic engineering efforts to date.
Last updated on 1 August 2005
{kind=link}