Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.15 Lackner-Wendt Auxon Replicators (1995)
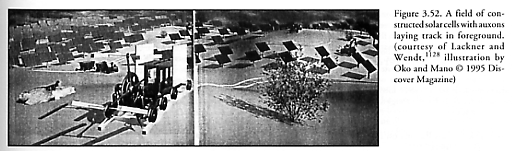
Inspired by Dyson’s 1970 suggestion [1034] of rock-eating desert replicators (Section 3.6), in 1995 Lackner and Wendt [1128] investigated the possibility of land-based, self-replicating machine systems on Earth: “A minimal system that satisfies the growth requirement would consist of a large solar cell array and a colony of diverse and specialized machines called auxons. With solar energy, raw dirt, and air as its input, the collective purpose of the colony is to expand the solar cell array and build more machines largely without human assistance. Once the desired size is attained, the entire production capacity of the system may be diverted to useful applications such as large scale energy collection, control of greenhouse gases in the atmosphere, and fresh water production.”
The colony (Figure 3.52) consists of numerous species of robots, or auxons, including many of the usual functional types that have been mentioned in prior studies of replicating systems. As one reporter [1129] describes it: “Digger auxons scrape an inch of dirt off the desert floor. Transport auxons carry the dirt to a beehive of electrified ovens. Out of these ovens, which work at superhigh temperatures, come useful metals, like iron and aluminum, or the silicon required for making computer chips. Production auxons shape these materials into machine parts and solar panels. Assembly auxons fit them into place.” The mobile robots are 10-30 cm in size with a mean lifespan of several growth cycles, are distributed about one every 10 m2, and run exclusively along an electrified grid embedded in a ceramic track (a ribbed structure 10 cm across in a continuous 1 meter x 1 meter gridwork forming an elevated factory floor) interspersed with 8-meter long, 50-cm wide linear kilns used to manufacture new track segments. The auxon population doubles every 3-6 months. This proposal exemplifies the “factory” or “unit growth” mode of replication manufacturing previously described in Section 3.13.2.2 except that the functional componentry is undifferentiated rather than being separated into distinct sectors of activity.
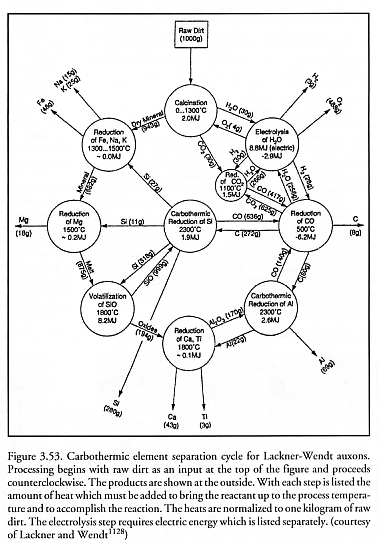
While “most of the system must be made of common elements,” there is no attempt to demonstrate complete materials closure. Elemental abundances of available raw materials are given, but there is no discussion of the specific elemental composition of the auxons themselves or of their supporting infrastructure (e.g., conveyors, crucibles, furnaces, high-temperature thermal sensors, chip-making plant, etc.). Lackner and Wendt outline an interesting method for separating out the 10 most common chemical elements found in raw desert topsoil using a high-temperature (up to 2300 oC) carbothermic process (Figure 3.53), and a limited form of materials processing closure is demonstrated in the sense that all process chemicals are themselves composed of the available 10 elements. The authors admit there are problems with the carbothermic approach – for instance, given the high diffusion rate of gaseous hydrogen “the potential for leakage at 1800 oC is very high” [1128], not to mention the potential for explosion in the oxygen-rich terrestrial atmosphere. Other studies [952] have rejected the carbothermic approach in favor of HF (hydrogen fluoride) acid leach [1105, 1106] or alternative processes which operate at lower temperatures, leave fewer impurities in the output products, require less insulating materials and generate considerably less waste heat. However, by relying solely on common elements, “it is not necessary to process much more material than is actually to be used in building the system, which would drastically inflate the energy requirements and slow the growth rate of the auxon system.”
Last updated on 1 August 2005
{kind=link}
{kind=link}