Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.12 Bishop Overtool Universal Assembler (1995-1996)
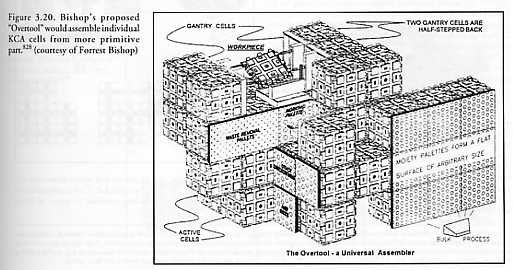
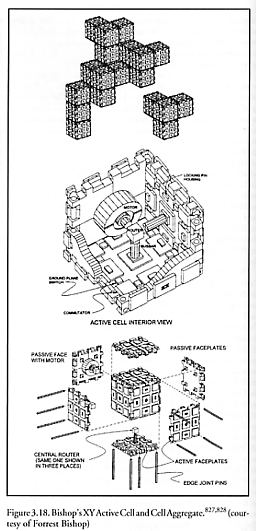
In 1995-1996, Bishop [825-828] proposed the “Overtool Universal Assembler” (Figure 3.20) as a system of kinematic cellular automaton (KCA) active cells (Figure 3.18) that could assemble individual KCA cells from more primitive parts [828]. Each of the KCA cells are cubic machine blocks called “XY cubes” measuring ~167 nm on an edge in the baseline design. The cube structural material is asserted to be diamondoid. Each active cell contains an embedded digital controller to allow communication between blocks and to perform other housekeeping functions, and an internal electromechanical interface switch for power and signals. Energy is delivered to the cell electrically, via sliding contacts, and the drive system is a type of linear electrostatic motor in which dielectric material is successively drawn into the gaps between the two plates of a switched row of capacitors.
When two XY cubes are interfaced and aligned, four tapered, retractable locking pins extend from one cell to complementary receivers in another cell, locking the two cubes together. The mechanical interfaces consist of orthogonal T-slots cut into the face of a cube. Each cube has an active faceplate on three of its adjoining faces, and passive faceplates on the other three faces. (The issue of van der Waals adhesion was mentioned but not seriously addressed in the paper.) These geometric features introduce a chirality to any aggregate of XY cubes, along with a specific orientation for mutual interfacing. Cube rotation is not permitted, so this internal organization is maintained regardless of the configuration of the aggregate. An active face is always adjoining a passive face as cubes slide against one another. A “motion primitive” is a single cell move across one cell length, with the moving cell beginning and ending in the aligned rest position. Multiple motion primitives applied to many cubes in many directions can produce complex movements and shape changes of the aggregate.
The Overtool itself is an active cell aggregate – a space-filling polyhedral aggregate with internal sliding planes and manipulators on the faces of some of the cells. “The essence of this proposal,” Bishop explains, “is to reduce the number of individual parts (the cells) to a small set of identical components governed by a few simple rules of interaction. A collection, or aggregate, of these cells then forms a device of arbitrary size which can change its configuration to fit the desired task. The active cells and nanomanipulators are further broken down into a set of standardized parts. The assembler may be capable of making and assembling all of these parts, thereby replicating itself.” The Overtool aggregate would “provide the necessary functionality, variability, and means of transport to form the core of a universal assembler, for macroscopic assembly as well as for positionally controlled chemical synthesis.”
Last updated on 1 August 2005
{kind=link}
{kind=link}