Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.10.1 Merkle Generic Assembler (1992-1994)
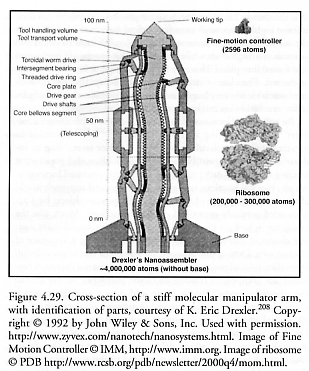
In 1992, Merkle published a set of broad specifications for a generic assembler design [211] which was to include positional mechanochemistry using “robot arms” similar to Drexler’s telescoping manipulator (Figure 4.29), plus a physical barrier to keep the internal workings of the machine (in vacuum) separate from the external (liquid) environment. The list of required specifications was to include the following items: (1) the type and construction of the computer; (2) the type and construction of the positional device; (3) the set of chemical reactions that take place at the tip; (4) how compounds are transported to and from the tip, and how the compounds are modified (if at all) before reaching the tip; (5) the class of structures that the assembler can build; (6) the nature of the internal environment in which the assembler mechanisms operate; (7) the method of providing power; (8) the type of barrier used to prevent unwanted changes in the internal environment in the face of changes in the external environment; (9) the nature of the environment external to the device; (10) the transport mechanism that moves material across the barrier; (11) the transport mechanism used in the external environment; and (12) a receiver that allows the assembler to receive broadcast instructions.
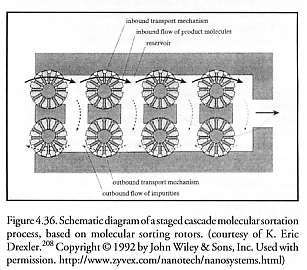
The generic assembler was to be able to manufacture a range of diamondoid products, where “diamondoid” was construed to include “atoms other than carbon such as hydrogen, oxygen, nitrogen, sulfur, and other elements that form relatively strong covalent bonds with carbon.” This would require, in turn, a significant number of different types of input molecules to be presented to the device as feedstock, in order to minimize the need for chemical processing: “To simplify the design, it might be desirable to provide all compounds in the feedstock in essentially the form in which they would actually be used. This would place the burden of synthesizing the specific compounds on whoever made the feedstock. If, on the other hand, we wished to provide only a relatively modest number of simple compounds in the feedstock, then there would have to be a corresponding increase in the complexity of the internal processing in the assembler in order to synthesize the required complex compounds from the simple compounds that were provided. Early designs will likely have limited synthetic capabilities and will be almost completely dependent on the feedstock for the needed compounds. As time goes by, some of the compounds provided in the feedstock will instead be synthesized directly within the assembler from simpler precursors. Ultimately, those compounds that can be synthesized more economically in bulk will not be synthesized internally by the assembler but will simply be provided in the feedstock. Those compounds which are more easily and economically made internally by the assembler will be eliminated from the feedstock.” A multi-stage cascade approach (Figure 4.36) would be used to transport and purify input compounds, both because feedstock might contain impurities and because the many different feedstock compounds must be segregated before use.
The generic assembler was to include an onboard computer: “It might well be that electronic designs will provide the best performance, [but] a broad range of designs for mechanical computers exists [and] the components of the molecular mechanical computer could be made from the class of diamondoid structures.” Additionally, the assembler was to include a mechanical pressure sensor to allow it to receive instructions acoustically through its liquid environment, which was regarded as a way to reduce onboard memory requirements: “Broadcasting instructions to the assemblers also means that the memory on board the assembler can be greatly reduced. Each assembler need only remember the small portion of the broadcast which pertains to its particular actions, and can ignore the rest. If the broadcast instructions are repeated periodically then each assembler need remember only enough instructions to keep it busy until the next broadcast is received. In the limit, each assembler could simply execute instructions intended for it as they were broadcast, and do nothing when instructions for other assemblers were being broadcast. This approach minimizes the memory that each assembler requires.”
By the end of 1992 [210], Merkle had adopted the above limit of fully “stripped down” assemblers that would consist solely of a molecular constructor: “The computational element has been moved into a large, macroscopic computer where the computation is done once, and the simple instructions that result from the computation are broadcast to the actual constructors. The molecular constructors are thus ‘gutless wonders’ – they are barely able to receive and interpret some simple instruction, such as ‘move your arm one nanometer to the left.’ This architecture allows the molecular constructor to be simpler and smaller than a general-purpose assembler, while the computational device is a conventional macroscopic computer.” Drexler’s Nanosystems [208], published earlier in 1992, had also proposed that “replacing computers and stored instructions with broadcast instructions can simplify molecular manufacturing systems.”
Unlike later designs, Merkle’s early generic design uses acoustic signals only to provide information, not energy, to the device. Merkle’s generic assembler was to be powered by “chemical energy from fuel provided in the external environment.”
Last updated on 1 August 2005
{kind=link}
{kind=link}