Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.23.2 Remote-Controlled Self-Replicating Robots (2002)
Chirikjian and Suthakorn [1284-1290] next describe several prototypes of self-replicating robotic systems that were developed by the undergraduate students and graduate student Yu Zhou during a one-semester mechatronics course taught in the Spring of 2002 at JHU. The students were divided into eight groups to explore designs and implementations of the concept of self-replicating robotic systems. The goal of the course was for each group of students to design a robot with the ability to create an exact functioning replica of itself, starting from a complete set of components or subsystems. A set of rules was established to motivate students to minimize the complexity of each individual subsystem while maximizing the number of subsystems in their designs. The use of LEGO® Mindstorm kits and additional LEGO® parts reduced building time in order to allow students to invest more time in designing and testing the prototypes, and the robots were remote-controlled (teleoperated) rather than autonomous so students could focus on the mechanical issues involved in the design of self-replicating systems. All experiments were conducted in an arena made of wood sheets 1 m2 in area with walls 30 cm high. The four most distinctive prototypes for self-replicating robotic systems included:
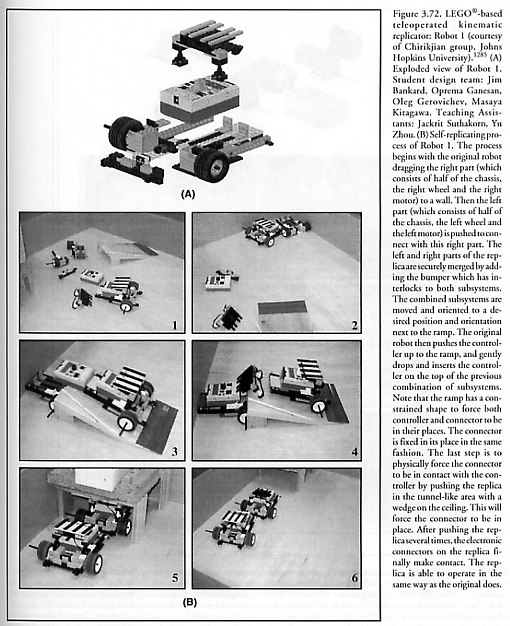
Robot 1: Fixture-Based Design. The first example consists of five subsystems (left part, right part, bumper, controller, and connector). Two fixtures are used: a ramp with a constrained shape which is fitted to the controller and the connector; and a tunnel-like cave with an attached wedge on the ceiling used to physically force the connector in place (Figure 3.72).
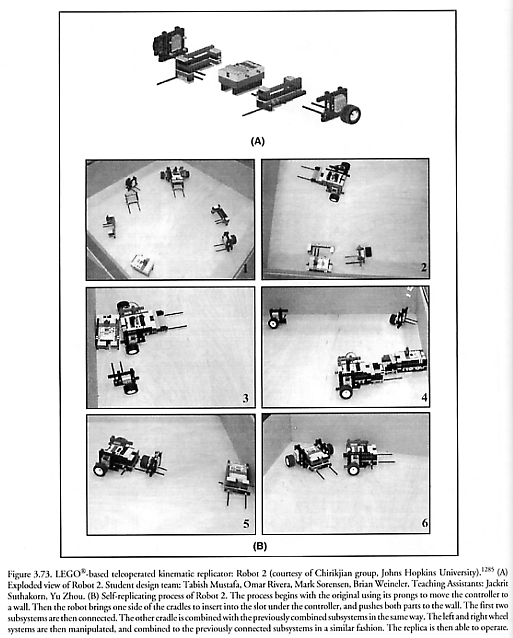
Robot 2: Single-Robot-Without-Fixture Design. Robot 2 has five subsystems (left wheel system, right wheel system, left cradle, right cradle, and controller). The original robot has a pair of prongs in the front part to manipulate components and the unfinished replica, and uses the rear part to push the subsystems to the wall in order to compress the subsystems together (Figure 3.73).
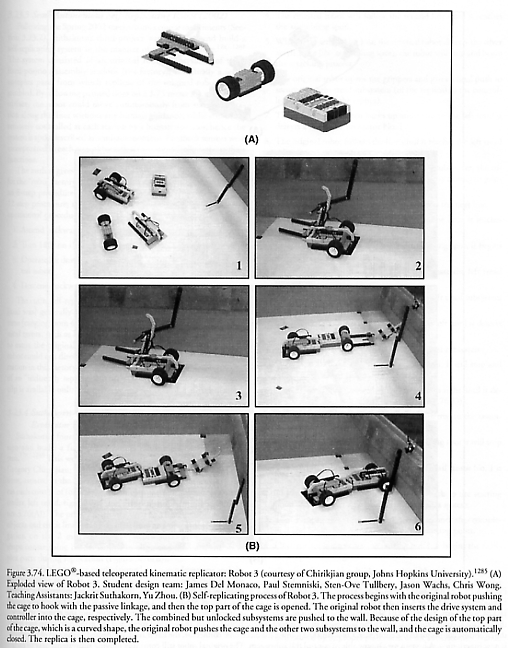
Robot 3: Another Fixture-Based Design. This robot consists of three subsystems: the controller; the drive system; and the cage. The cage has a hinge that allows the top part of the cage to open and close to cover the wheel system and controller. The electronic connectors are attached on the top part of the cage. A passive dual linkage is hanging to assist in opening the cage (Figure 3.74).
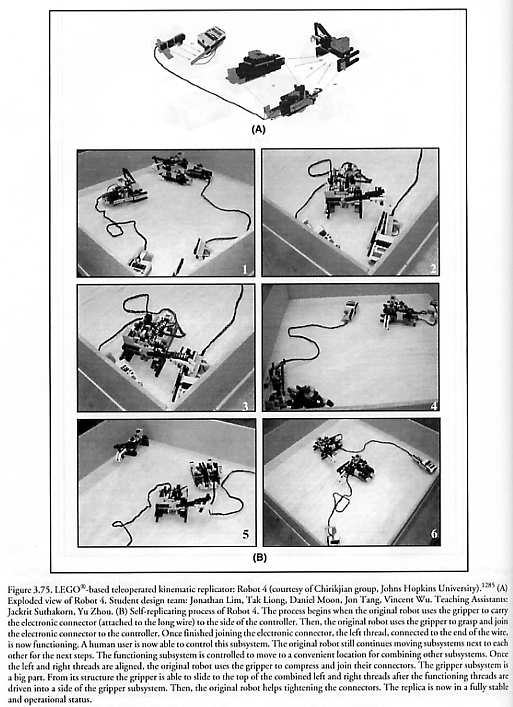
Robot 4: Operating Subsystems Assist in the Replication Process. In this design a subsystem is able to operate before finishing the replication process, and hence can assist in the assembly of the complete replica. Robot 4 (Figure 3.75) consists of the controller, the left thread (a long wire with electronic connectors), the right thread, and the gripper subsystem.
The authors [1285] concluded: “The study of self-replicating robots is an interesting research area which has not been extensively pursued in recent years. A number of self-replicating robot designs were presented here. The different designs devised by our students has helped us to identify new research problems, and to categorize self-replicating robots. Many challenging issues remain. Our future work will be to develop truly autonomous [1291] (rather than remote-controlled) self-replicating robots.”
Last updated on 1 August 2005
{kind=link}
{kind=link}
{kind=link}
{kind=link}