Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.23.1 Prototype 1 (2001)
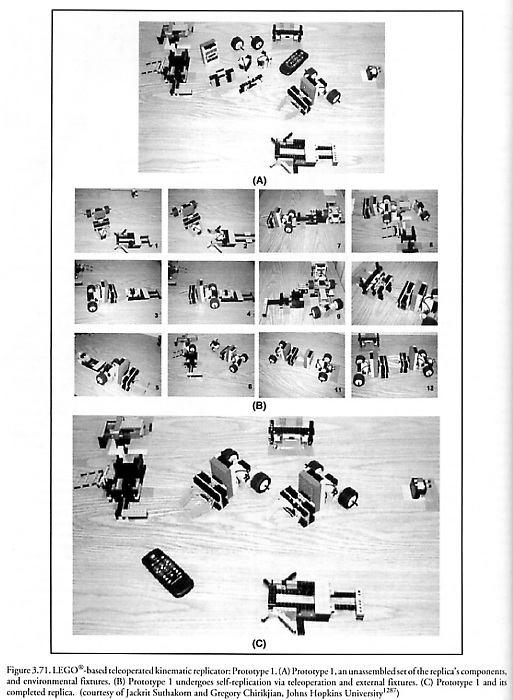
As recorded in his April 2003 Ph.D. thesis, Suthakorn [1287] built his first simple prototype remote-controlled LEGO®-based robot in 2001 to demonstrate that it is mechanically feasible for a robot to produce a copy of itself. “Prototype 1” consisted of 7 subsystems: left motor, right motor, left wheel, right wheel, micro-controller receiver, manipulator wrist, and passive gripper (Figure 3.71(A)). Several passive fixtures were located in the assembly area to assist the robot in assembling its replica. The robot depends for its success on these external passive fixtures, which are not actuated but are manipulated by the replicator robot. The original robot is remotely controlled to relocate its subsystems from a storage area to the assembly area, whereupon the original robot is guided to perform the assembly process (Figure 3.71(B)) – a process Suthakorn [1287] describes as follows:
“The original robot retrieves the left motor subsystem from the storage area and slides it into a motor assembling fixture (this fixture is designed to have a narrow slot so that when the motors are placed in it, they are forced to align with each other). The robot then moves the right motor subsystem from the storage area into the motor-assembling fixture. After both left and right motors are aligned in the fixture, the robot exerts pressure on the subsystems so that they snap together and form one piece. The original robot then manipulates the motor-assembling fixture so as to release the motor subsystem, which completes the first stage of assembling the subsystems. The robot then takes the motor subsystem and slides it into a wheel-assembling fixture which is designed to assist attaching the left and right wheels to the subsystem. After the wheels are successfully attached to the motor subsystem, the robot manipulates the wheel fixture to release the assembled part. The robot continues to perform procedures similar to the previous steps to relocate parts and assemble them. This process leads to the completion of a replica (Figure 3.71(C)) of the original robot.”
Last updated on 1 August 2005
{kind=link}