Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.13.1 NASA Robot Replication Feasibility Demonstration
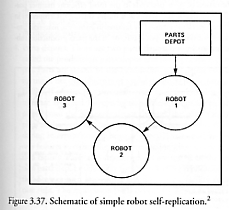
Directly inspired by von Neumann’s original “sea of parts” kinematic machine replicator concept (Section 2.1.2), the NASA robot replicator demonstration [1101] (early draft authored by R. Cliff) begins with a parts depot stocked with enough subassemblies for the production of two robot manipulators and their associated computer systems. For simplicity, all parts are stocked in known positions in designated bins, eliminating much of the need for parts verification during assembly. One complete, operating robot, Robot 1, is initially present and constructs Robot 2 which will, in turn, construct Robot 3 (Figure 3.37), thus passing the “fertility test.”
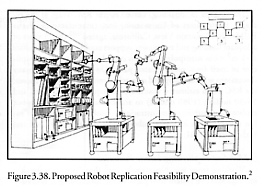
Robot 1 begins its labors by obtaining, one at a time, the subassemblies for the base (which doubles as the electronics card cage assembly) of Robot 2 from the parts depot. Robot 1 assembles the base, computer, and servo controls for Robot 2. Then, one at a time, Robot 1 obtains the subassemblies for the manipulator arms of Robot 2 and constructs the arms of Robot 2 from them. Once Robot 2 has been completely assembled, Robot 1 plugs in the power cord of Robot 2. Finally, Robot 1 obtains a blank diskette (a removable mass memory device for computers) from the parts depot, inserts the diskette into its own computer, copies its software onto the diskette, and then removes the diskette from its own computer. After less than an hour of work, replication is complete when Robot 1 turns on the power to Robot 2, inserts the diskette (which now has a copy of the operating software on it) into Robot 2’s computer, and then pushes the start button on the computer. From then on, Robot 2 is autonomous (Figure 3.38).
It should be noted that some additional complexity was introduced into the demonstration by explicitly transferring the instructions from one generation of robot to the next by physical movement of a recording medium. This strategy was employed to make it clear that the generations are truly autonomous.
To facilitate multiple demonstrations the robots can be ordered to disassemble one another and return the parts to the parts depot, by following their coded instructions in reverse. Care should be taken to ensure that each of the assembly operations is reversible so that disassembly is possible – bolts should be used in preference to glue, welding, or rivets; mechanical and electrical connections should be engineered to stand up under repeated connection and disconnection; and so forth.
A top-level description [1102] was written of the assembly steps required to produce such a robot manipulator system from about 2 dozen subassemblies, complete with control computer and required electronics support. The NASA demonstration robots were anticipated to be similar to the PUMA industrial assembly robot, which had about 500 distinguishable “parts” with about 50 in the wrist assembly alone [1102]. Replication would include the following sequence: (1) assemble base frame and bolt it to floor; (2) install card cages in frame; (3) install cables between card cages; (4) insert printed circuit cards into card cages; (5) assemble manipulator waist joint support to base frame; (6) install waist joint; (7) install manipulator trunk (vertical member); (8) install shoulder joint; (9) install upper arm; (10) install elbow joint; (11) install forearm; (12) install wrist joint; (13) install end effector; (14) install television camera mast; (15) install television camera; (16) connect television camera to electronics in base; (17) connect manipulator to electronics in base; (18) connect AC power and turn on computer; (19) transfer construction software; and (20) boot up the new computer. Having been replicated as thus detailed, the new robot would then be on its own.
Dr. Charles H. Spalding, visited by the RSC Team at the research laboratories of Unimation, Inc. (manufacturer of the PUMA) in Mountain View, California, agreed [1102] that 5 years of adequate funding and manpower support could probably produce a ~1 m3 robot manipulator system capable of assembling a duplicate of itself from prefabricated parts. On the basis of its many discussions with industry and research community representatives, the RSC Team estimated that it would require about 5 years and $5-50 million (1980 dollars) to accomplish the proposed robot replication feasibility demonstration.* A substantially similar “robot replication facility” was subsequently described by Dorf and Bishop [1103] in 2001.
* Just 22 years later, a significant portion of the proposed NASA replicating robot demonstration was finally achieved (Sections 3.23 and 3.25.2) using small LEGO®-based devices made from four complex parts in a robotics laboratory in the Department of Mechanical Engineering at Johns Hopkins University.
Last updated on 1 August 2005
{kind=link}
{kind=link}