Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.9.A Replication Control
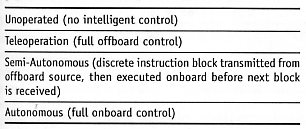
A1. Replication Control Autonomy. Teleoperation corresponds to the well-known “broadcast architecture” [208-210] (Sections 2.3.6 and 4.11.3.3) – a generic term for a replicating system where the replicating units do not carry blueprints (i.e., no DNA, no assembly instructions, etc). Instead, instructions are broadcast to all replicating units which then carry out the broadcast instructions. Living systems, because they carry their own blueprints in every cell, are not using a broadcast architecture. However, within the biological cell, the ribosome is the principal protein manufacturing system – and proteins receive their operating instructions as chemical broadcast signals (mRNA messenger molecules) emitted from a central location, the cell nucleus. Block the mRNA chemical broadcast from reaching the ribosomes, and cellular protein production stops and the cell ceases replicating. The literature gives many examples of such anti-mRNA molecules being prepared experimentally for just this purpose – for example, one paper [2451] reports using a particular anti-mRNA to attack a single type of mRNA molecule, inhibiting synthesis of one particular protein by 98%. The “inherent safety” (Section 5.11) of the broadcast architecture (or the vitamin architecture) derives from the fact that the replicator can be physically separated from some vital resource (e.g., information or vitamin parts), and not from the fact that the system is, or is not, “biological”.
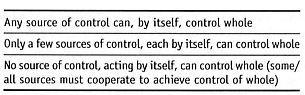
A2. Replication Control Redundancy.
In the case where there is more than one source of control of a replicator,
can any one source exert exclusive and complete control, or must the various
sources of control either cooperate to control the whole or alternatively control
only some subset of replicator activities?
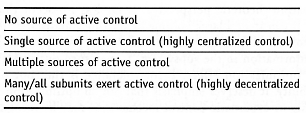
A3. Replication Control Centralization.
Muscle cells with multiple nuclei are an example of replicators having multiple
sources of control. Local control systems are more lifelike, scalable, robust
and adaptable than single-source or centralized control systems [481].
To enhance the prospects for “inherently safe” systems (Section
5.11), single-source or centralized control systems are probably preferred
for artificial replicators. This dimension is concerned with the number of control
sources a replicator possesses, as distinguished from A1
which is concerned with the location of those sources of control (onboard or
offboard).
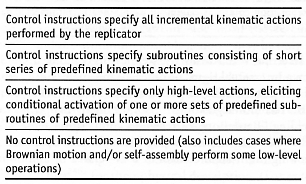
A4. Replication Control Abstractivity.
How concrete, or abstract, are the instructions provided to the replicator that
cause it to perform kinematic actions leading to replication or other manufacturing?
In general, replicator safety should be enhanced by using less-abstract control
instructions.
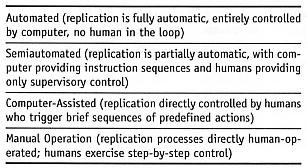
A5. Replication Control Source.
To what degree is human control a part of the replicative process, as opposed
to automatic (computer) control? Asks Evan Malone [1166]:
“Hybrid systems consisting of machines and humans together are already
self-replicating: technological civilizations are self-replicating, and are,
in some sense, engineered. Would a factory in which humans performed operations
which are commanded by an AI be more or less self-replicating than a factory
in which humans command operations performed by robots?”
A6. Replication Control
Complexity. This is intended to be a specific quantitative measure,
e.g., a bit count or bit rate. This dimension represents a continuum of values
with divisions applied as convenient. Thinking about complexity, von Neumann
[3] wrote: “I am not thinking about how involved
the object is, but how involved its purposive operations are. In this sense,
an object is of the highest degree of complexity if it can do very difficult
and involved things.” See also dimensions B6
and B10.
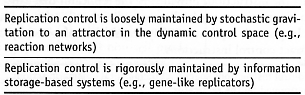
A7. Replication Control
Maintenance. As proposed by Szathmary [2417],
replicator goal maintenance may be achieved either by stochastic gravitation
toward an “attractor” in the dynamic control space, or more directly
by “storage” based control information (Section
5.1.4(5)). Warns Yudkowsky [2452]:
“A critical question is what type of cybernetic control processes operate
within the replicator. Even the simplest thermostat, from an information-theoretic
perspective, is far less innocent than it seems. It can steer a large volume
of starting microstates into a small volume of final microstates. It decreases
entropy and hence adds information in the subsystem. It may turn out to apply
a covert optimization effect. Error tolerance is the root of all evolvability.
It deserves emphasis that not all optimization subprocesses or cybernetic control
mechanisms may be recognized as such, unless subject to audit on the volume
of the incoming and outgoing state space.”
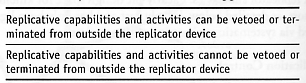
A8. External Veto Authority.
Replicators could be disabled or shut down by external signal or other means,
maintaining creator control and contributing to public safety (Section
5.11). For example, the technical regulations [2453]
for the highly-dangerous weapons-wielding “BattleBots” of televised
competition fame [2454] include the following
numerous provisions for safe operation and for regaining full human control
of teleoperated or autonomous devices:
2.6.2 AUTONOMOUS BATTLEBOTS AND COMPONENTS -- An autonomous function is one that moves the BattleBot or operates a weapon independently of any remote control input. Control feedback devices such as steering gyros and motor speed servos are not considered to be autonomous components. Autonomous BattleBots or autonomous components on a BattleBot are allowed, provided that: (a) When a BattleBot is activated, all autonomous functions are initially disabled, and require a specific remote command to become enabled. (b) The BattleBot’s remote control system can be used to override and stop any and all BattleBot and weapon system autonomous motion. (c) All autonomous systems comply with the specifications of “3.1.2 Fail-Safe”. (d) The BattleBot has a clearly visible external light to indicate when any autonomous function is enabled.
3.1.2 FAIL-SAFE OPERATION – All BattleBots require a robust fail-safe system that electronically or mechanically shuts off all motion-system and weapons power within one (1) second after the remote-control transmitter is switched off, or otherwise stops transmitting.
5.4.4 SECONDARY POWER SWITCH – All BattleBots are required to have a switch that allows the remote-control receiver power to be switched on and off independently of the primary-power Master Switch.
6.6.1 RADIO FAIL-SAFE – Upon loss of the remote-control signal, any ICE [Internal Combustion Engine] in a BattleBot has to either shut off (cease producing power) or begin returning to idle speed within one (1) second of signal loss.
6.6.2 AUTOMATIC MECHANICAL DISCONNECT – Any ICE in a BattleBot requires a centrifugal clutch or other mechanical disconnect mechanism designed so that, while the engine is running at idle speed, there cannot be hazardous movement of the BattleBot itself, or of any external weapon component driven by that engine. If a disconnect system is directly remote controlled, it has to automatically revert to a disconnected configuration if the remote control signal is lost.
6.6.3 REMOTE SHUT-OFF – Any ICE in a BattleBot must be able to be completely shut off (cease producing power) using the remote control.
Perhaps the most endearing illustration of the unfortunate results of a lack of external veto on artificial replicators may be seen in the animated Disney classic “The Sorcerer’s Apprentice” [2455].*
* The Sorcerer’s Apprentice (which featured uncontrollably-growing numbers of animated brooms carrying water buckets) was loosely based on the writing of the German author and philosopher Johann Wolfgang von Goethe (1749-1832) in his 1779 ballad “Der Zauberlehrling” (The Magician’s Assistant) [2456]. The ballad was itself derived from the dialogue “Philopseudes” (The Lover of Lies) [2457] by the Greek satirist Lucian of Samosata (ca. 120-190 AD), and the original story probably dates back to ancient Egypt.
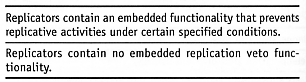
A9. Embedded Replication
Veto. Replicators could carry within them an automatic switch which
prevents the conduct of replicative activities under certain well-defined circumstances.
For example, environmental concerns [2458]
that genetically modified plants might spread their genes to related crops in
nearby fields led researchers to develop anti-crossbreeding systems such as
the so-called “terminator technology” in genetically-modified crops
[2459], with only limited success [2458,
2460]. In a more sophisticated approach
[2461], a “seed lethality”
gene that prevents seeds of a tobacco plant from germinating is first inserted
into the plant genome, resulting in a plant that still has normal growth and
seed production. This plant is then crossed with another that has an added gene
to repress the seed lethality gene, producing offspring plants with viable seeds
that can continue to propagate indefinitely through self-pollination. But when
these plants are crossed with normal tobacco plants the seed lethality gene
and the suppressor gene are separated and the resulting seeds cannot grow, thus
preventing further spread in the wild. Similarly, virotherapies using oncolytic
viruses that are replication competent in tumors but not in normal cells offer
a novel approach for treating neoplastic diseases [2462].
Last updated on 1 August 2005