Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
5.1.3 Hasslacher-Tilden MAP Survival Space (1994-1995)
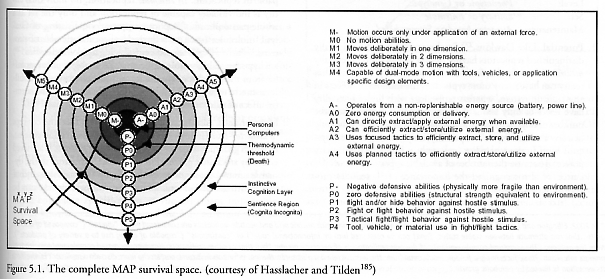
Brosl Hasslacher and Mark W. Tilden at Los Alamos National Laboratory have devised [185] a robotics design space for the creation of machines whose functions are intended to “guarantee an autonomous machine’s survival,” based on the following set of “biomorphic survival laws”:
These requirements define the Mobility, Acquisition, and Protection (MAP) survival space for autonomous biomorphic designs shown in Figure 5.1. The authors claim that full autonomous operation of artificial “biomorphs” requires sensation, cognition, locomotion, and manipulation, though it is possible for machines to survive on locomotion alone. Clearly several additional capabilities would be required for these machines to exhibit self-replication as well as mere survival (durability), but the authors do not discuss this possibility.
Hasslacher and Tilden evidently believe that machine replication is both difficult and undesirable, and thus recommend instead building robots that are extremely durable: “Machines cannot be made to reproduce themselves easily, nor would we want them to. At small scales, with carbon-based materials platforms, self-reproduction could be quite dangerous. Therefore if machines are to survive acceptably then we must extend their lifetime to many years in full operation. This means an autonomous machine must extract power from its environment and since that power may be either weak or scarce, it must be able to operate by storage of and access to power on demand. In normal scale environments this implies solar powered machines.”
In the case of micron-scale machines fabricated using silicon-based lithography: “At this scale self-assembling colonies of biomorphic machines are not only practical, but desirable. Colonies should both self-organize physically and develop collective or emergent behavior....A colony of diverse biomorphic tiles could create a space of finite elements that organize into larger collective creatures with a potential for tile-cluster ‘reproduction’. That is, there may be tile structures that make copies of themselves from the suspended tile matrix they ‘live’ in, ...[which] would lead to observed machine reproduction in a safe, linear regime, rather than dangerous exponential growth.” However, no details are given as to how the individual micron-scale machines or “biomorphic tiles” might assist in the fabrication of additional similar such machines.
Some research on biologically-inspired microscale robots has begun [2406-2410].
Last updated on 1 August 2005
{kind=link}