Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
4.15 Bishop Rotary Assembler (1998)
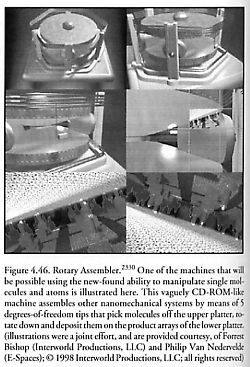
In 1998, an illustration (Figure 4.46) and an animation [2330] of one possible version of a nanomanipulator array assembler system was conceived and designed by Forrest Bishop of Interworld Productions [2330]. The XY table with a putative buckytube STM tip might possibly have been inspired by a Zyvex illustration or by the written description of the proposed Zyvex array assembler system (Section 4.14), as its operation is somewhat similar.
According to Bishop [2331]: “The upper platter holds bulk-deposited molecules or moieties. An array of massively-parallel simple manipulators removes the molecules from the upper platter and adds them to devices being assembled on the lower platter. Different areas of the feedstock platter might have different kinds of molecules, such that several assembly steps can be carried out before having to change out the upper platter. The conical roller moves radially, while the upper platter moves up and down, to access these different areas. The STM tips would have some ability to compensate for the slippage of the roller as the tip reaches for its target.”
Last updated on 1 August 2005
{kind=link}