Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
3.23.4 Suthakorn-Cushing-Chirikjian Autonomous Replicator (2002-2003)
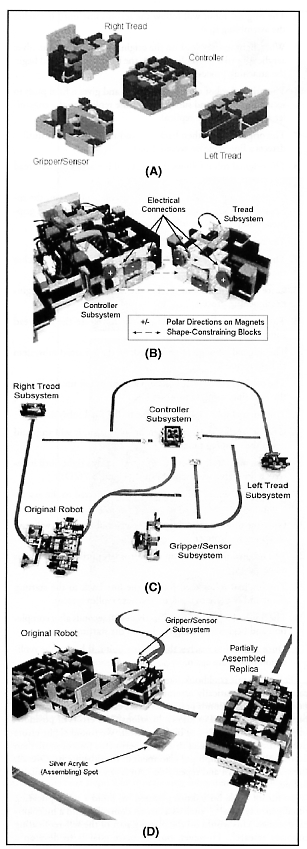
Suthakorn’s fourth and final project presented here was to design and build a fully autonomous self-replicating robotic system [1287, 1289]. This work took place under the direction of professor Gregory Chirikjian; also, Andrew Cushing, a local high school student, assisted in the building of the device. The robot and its replicas each consist of four separate complex parts or “subsystems”: controller, left tread, right tread, and gripper/sensor components (Figure 3.76(A), caption). The prototype device used two light sensors to detect objects and track lines (blue-painted lines and silver spots) for navigation on the 2 meter x 3 meter work surface. Magnets and shape-constraining blocks helped to align and interlock the complex parts during replication (Figure 3.76(B), caption).
The replica’s parts are prepositioned at known locations and the original robot starts at the initial position (Figure 3.76(C), caption). The explicit replication procedure is worth quoting verbatim from Suthakorn [1287] in its entirety:
Following this cookbook-like procedure, the original robot was capable of automatically assembling its replicas. The replication process took 135 seconds per cycle. While each of the four complex parts had to be placed in known locations, “the errors of positioning and orientation are not highly critical. We found slight errors during the grasping process in a few experiments (out of more than 20 trials) caused by improper placement of the subsystems. Overall, the system is robust and repeatable.” An AVI video clip is available online [1293].
In future work, Suthakorn planned “to build a self-replicating intelligence system [1290] such as a circuit controller and a mechanical decoder. This would fill the missing part of the self-replicating robotics research. However, our ultimate goal is to develop a self-replicating robotic system capable of autonomously assembling its replicas from simple components using only electromechanical intelligence, i.e., a mechanical code and transistor-based control circuits. This eliminates complicated electronic components such as programmable micro-controllers, and makes the concept more appropriate for future space systems that can use in-situ resources for self-replication.” [1287] Pursuing this objective, the syllabus for the Spring 2003 mechatronics course [30] at the JHU Department of Mechanical Engineering, called “the intelligence of self-replicating robots,” is described as follows:
This course is a hands-on, interdisciplinary design project, in which juniors, seniors, and graduate students from all engineering disciplines work together to design, build, and debug robots. This year we continue the exploration of self-replicating robots. Last year, each group built a remote-controlled self-replicating robot. This year our goal is to build autonomous self-replicating electromechanical intelligences. Each group will build a robot consisting of an arm, a control circuit for the arm, and a machine code program to control the arm, among which the circuit and the code should be replicable. The objective is that the arm should be able to implement the same function as before, after being connected to the resulting new circuit and code. The whole system will be built by using LEGO kits. Students are required to build their own logic control circuits which are made up of LEGO pieces embedded with electronic components, such as transistors, resistors, and capacitors. The “program” will also be built with LEGO pieces, and should consist of at least 10 bits but not more than 100 bits. Presentation will be within the week from May 5 to 9, 2003.
Interestingly, Suthakorn’s autonomous replicator passed the “fertility test” recommended by the RSC Team of the 1980 NASA lunar replicator study [2] for their replication feasibility demonstration (Section 3.13.1): “All the replicas were also capable of completing the same replicating process,” says Suthakorn [1287]. “We believe that this prototype was the world’s first fully functional autonomous self-replicating robot.”
Last updated on 1 August 2005
{kind=link}
{kind=link}