Kinematic Self-Replicating Machines
© 2004 Robert A. Freitas Jr. and Ralph C. Merkle. All Rights Reserved.
Robert A. Freitas Jr., Ralph C. Merkle, Kinematic Self-Replicating Machines, Landes Bioscience, Georgetown, TX, 2004.
2.2.2 Computational Modeling with Continuous Space and Virtual Physics
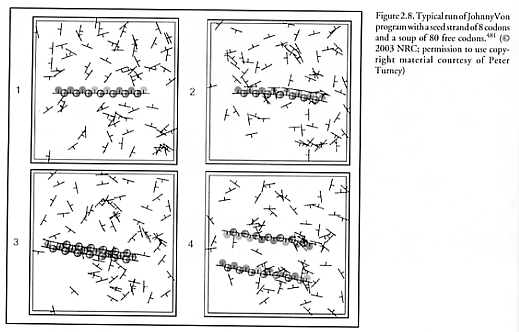
There is a long history of work on self-replicating cellular automata (Sections 2.1.3 and 2.2.1) which are discrete, finite-state, abstract machines that replicate in a tessellated (fixed-grid) universe, like the squares on a checkerboard. But some researchers believe that continuous models may have many advantages over discrete models, such as increased realism (because the real physical world is continuous) and robustness. (The distinction between “discrete” and “continuous” comes from mathematics, wherein, for example, the integers are discrete but the real numbers are continuous.) Following this idea, Smith, Ewaschuk and Turney [481] have recently developed a computer model called “JohnnyVon” which consists of self-replicating mobile automata that move around in a continuous two-dimensional space – a virtual “soup” of simulated fluid. The particles are subject to simulated laws of artificial physics including inertia, Brownian motion, pseudo-viscosity, and spring-like attractive and repulsive forces. The choice of a 2-D space for the initial work was a tradeoff between computational complexity and realism, since 2-D is more realistic than 1-D yet is easier to compute than a 3-D model (the present 2-D simulation runs on a desktop computer).
The automata particles or “codons” (each carrying one bit of information) can encode arbitrary bit strings and comprise T-shaped virtual objects that possess both attractive and repulsive fields. These objects form chains and the chains replicate, much like DNA replicates (Figure 2.8). The initial seed pattern can be arbitrary. In nature, a seed pattern such as a particular string of DNA can replicate, but it can also encode a plan for building something such as a protein, cell, or organism. In the original implementation of JohnnyVon, seed patterns can only replicate; they do not encode plans for building things. That is, they are all genotype, no phenotype.
Consistent with the Foresight Guidelines (Section 5.11), JohnnyVon’s design does include a built-in safety factor: it can only assemble things using the codons as components. The system includes no ability to create new codons out of raw materials found in the environment. New codons must be created by some other process – in a physical implementation, this would presumably require some type of external traditional manufacturing process such as lithography. Notes Turney [555]: “It’s as if we had discovered a way to make Lego bricks self-assemble into finished structures. Once all the loose Lego bricks are used up, the process necessarily halts.”
However, because the researchers are interested in investigating aspects of living systems as opposed to manufacturing systems, their approach incorporates several capabilities that might diminish the “inherent safety” (Section 5.11) of the replication. For example, even without a starting seed, self-replicating patterns can arise spontaneously. In other experiments that do use a seed pattern, JohnnyVon demonstrates four properties required for evolution: (1) patterns that replicate, along with (2) characteristics that are inherited, along with (3) mutation and (4) a selection process that favors the replication of some patterns over others, based on their inherited characteristics [555]. Evolvability (Section 5.1.9 (L)) is an undesirable property of physical replicators intended to perform their functions safely in the physical world, so additional safeguards to forestall evolution may be required before JohnnyVon should be developed into a robust physical implementation.
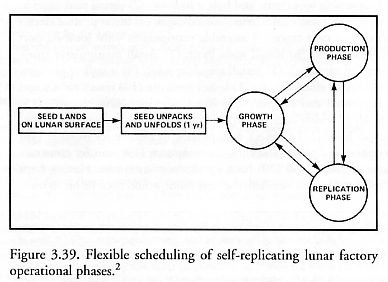
The next step in this research – to add phenotypes, ongoing work still unpublished as of 2003 – includes a new software implementation [555] wherein a strand replicates a fixed number of times and then ceases all further replication. After ceasing replication, the strand enters a new state in which it becomes a “phenotype” (a “body”) rather than a “genotype” (a template for replication). In this new “phenotype” state, the strand is no longer straight; it folds into a shape that is determined by the pattern of 0s and 1s that it encodes, intended to be analogous to the way that proteins fold in real life. The angles between adjacent codons in the strand depend on whether a 0 codon is adjacent to a 1 codon, two 0 codons are adjacent, or two 1 codons are adjacent. The strand can be bent into an arbitrary shape by encoding the appropriate sequence of 0s and 1s. Turney [555] explains: “The obvious approach to ‘productive replicators’ (Section 5.1.9) is to have two types of entities: replicating entities (genotypes) and final product entities (phenotypes). Instead, we have a single entity that switches roles over time (genotype as a child, phenotype as an adult) (cf. Figure 3.39). This is a very efficient approach to manufacturing, since all of the entities eventually become part of the final product. There is no residue of non-functional replicating entities that must be filtered out of the final product.”
Last updated on 1 August 2005
{kind=link}
{kind=link}